![]() אַפּערייטינג ינסטראַקשאַנז
אַפּערייטינג ינסטראַקשאַנז
Elektor Arduino
NANO
טראַינינג באָרד MCCAB®
רעוו. 3.3
ליב קונה, די MCCAB טראַינינג באָרד איז מאַניאַפאַקטשערד אין לויט מיט די אָנווענדלעך אייראפעישער דיירעקטיווז און דעריבער טראגט די CE צייכן. זייַן בדעה נוצן איז דיסקרייבד אין די אַפּערייטינג ינסטראַקשאַנז. אויב איר מאָדיפיצירן די MCCAB טראַינינג באָרד אָדער טאָן ניט נוצן עס אין לויט מיט זיין בדעה ציל, איר אַליין זענען פאַראַנטוואָרטלעך פֿאַר העסקעם מיט די אָנווענדלעך כּללים.
דעריבער, נאָר נוצן די MCCAB טראַינינג באָרד און אַלע קאַמפּאָונאַנץ אויף עס ווי דיסקרייבד אין די אַפּערייטינג ינסטראַקשאַנז. איר קענט בלויז פאָרן די MCCAB טראַינינג באָרד צוזאַמען מיט דעם אַפּערייטינג מאַנואַל.
אַלע אינפֿאָרמאַציע אין דעם מאַנואַל רעפערס צו די MCCAB טראַינינג באָרד מיט די אַדישאַן מדרגה רעוו. 3.3. די אַדישאַן מדרגה פון די טראַינינג באָרד איז געדרוקט אויף די דנאָ זייַט (זען פיגורע 13 אויף בלאַט 20). די קראַנט ווערסיע פון דעם מאַנואַל קענען זיין דאַונלאָודיד פֿון די webפּלאַץ www.elektor.com/20440 פֿאַר אראפקאפיע. ARDUINO און אנדערע Arduino סאָרט נעמען און לאָגאָס זענען רעגיסטרירט טריידמאַרקס פון Arduino SA. ®
ריסייקלינג
![]() געוויינט עלעקטריקאַל און עלעקטראָניש ויסריכט מוזן זיין ריסייקאַלד ווי עלעקטראָניש וויסט און מוזן נישט זיין דיספּאָוזד אין הויזגעזינד וויסט.
געוויינט עלעקטריקאַל און עלעקטראָניש ויסריכט מוזן זיין ריסייקאַלד ווי עלעקטראָניש וויסט און מוזן נישט זיין דיספּאָוזד אין הויזגעזינד וויסט.
די MCCAB טראַינינג באָרד כּולל ווערטפול רוי מאַטעריאַלס וואָס קענען זיין ריסייקאַלד.
דעריבער, אַוועקוואַרפן די מיטל אין די צונעמען זאַמלונג לאַגער. (EU דירעקטיוו 2012/19 / אי.יו.). דיין שטאָטיש אַדמיניסטראַציע וועט זאָגן איר ווו צו געפֿינען די ניראַסט פריי זאַמלונג פונט.
זיכערקייַט ינסטראַקשאַנז
די אַפּערייטינג ינסטראַקשאַנז פֿאַר די MCCAB טראַינינג באָרד אַנטהאַלטן וויכטיק אינפֿאָרמאַציע וועגן קאַמישאַנינג און אָפּעראַציע!
דעריבער, לייענען די גאנצע אַפּערייטינג מאַנואַל קערפאַלי איידער איר נוצן די טריינינג ברעט פֿאַר די ערשטער מאָל צו ויסמיידן שאָדן צו לעבן און ענדגליד רעכט צו עלעקטריש קלאַפּ, פייַער אָדער אַפּערייטינג ערראָרס און שעדיקן צו די טראַינינג באָרד.
מאַכן דעם מאַנואַל בנימצא צו אַלע אנדערע ניצערס פון די טריינינג ברעט.
דער פּראָדוקט איז דיזיינד אין לויט מיט די IEC 61010-031 נאָרמאַל און איז טעסטעד און לינקס דער פאַבריק אין אַ זיכער צושטאַנד. דער באַניצער מוזן אָבסערווירן די רעגיאַליישאַנז אָנווענדלעך צו די האַנדלינג פון עלעקטריקאַל עקוויפּמענט, ווי געזונט ווי אַלע בכלל אנגענומען זיכערקייַט פּראַקטיסיז און פּראָוסידזשערז. אין באַזונדער, די VDE רעגיאַליישאַנז VDE 0100 (פּלאַנירונג, ינסטאַלירונג און טעסטינג פון נידעריק-וואָלtage עלעקטריקאַל סיסטעמען), VDE 0700 (זיכערקייַט פון עלעקטריקאַל ויסריכט פֿאַר דינער נוצן) און VDE 0868 (עקוויפּמענט פֿאַר אַודיאָ / ווידעא, אינפֿאָרמאַציע און קאָמוניקאַציע טעכנאָלאָגיע) זאָל זיין דערמאנט דאָ.
אין געשעפט פאַסילאַטיז, די צופאַל פאַרהיטונג רעגיאַליישאַנז פון געשעפט עמפּלויערס אַכרייַעס פאַרזיכערונג אַסאָוסייישאַנז אויך אַפּלייז.
זיכערקייַט סימבאָלס געניצט
![]() עלעקטריקאַל ריזיקירן ווארענונג
עלעקטריקאַל ריזיקירן ווארענונג
דער צייכן ינדיקייץ טנאָים אָדער פּראַקטיסיז וואָס קען רעזולטאַט אין טויט אָדער פּערזענלעך שאָדן.
![]() אַלגעמיינע ווארענונג צייכן
אַלגעמיינע ווארענונג צייכן
דער צייכן ינדיקייץ טנאָים אָדער פּראַקטיסיז וואָס קען פירן צו שעדיקן צו די פּראָדוקט זיך אָדער פארבונדן ויסריכט.
2.1 מאַכט צושטעלן
![]() וואָרענען:
וואָרענען:
- אין קיין צושטאנדן קען נעגאַטיוו וואָלtagעס אָדער וואָלtagעס איז מער ווי +5 V קאָננעקטעד צו די MCCAB טראַינינג באָרד. די בלויז אויסנעמען זענען די ינפּוץ VX1 און VX2, דאָ די אַרייַנשרייַב וואָלtagעס קען זיין אין די קייט פון +8 וו צו +12 וו (זען אָפּטיילונג 4.2).
- קיינמאָל פאַרבינדן קיין אנדערע עלעקטריקאַל פּאָטענציעל צו די ערד ליניע (GND, 0 V).
- קיינמאָל ויסבייַטן די קאַנעקשאַנז פֿאַר ערד (GND, 0 V) און +5 V, ווייַל דאָס וואָלט פירן צו שטענדיק שעדיקן צו די MCCAB טראַינינג באָרד!
- אין באַזונדער, קיינמאָל פאַרבינדן ~ 230 וו אָדער ~ 115 וו מיינזtagצו די MCCAB טראַינינג באָרד!
 עס איז אַ סכנה צו לעבן !!!
עס איז אַ סכנה צו לעבן !!!
2.2 האַנדלינג און ינווייראַנמענאַל טנאָים
צו ויסמיידן טויט אָדער שאָדן און צו באַשיצן די מיטל פון שעדיקן, די פאלגענדע כּללים מוזן זיין שטרענג באמערקט:
- קיינמאָל אַרבעטן די MCCAB טראַינינג באָרד אין רומז מיט יקספּלאָוסיוו וואַפּערז אָדער גאַסאַז.
- אויב יונגע מענטשן אָדער מענטשן וואָס זענען נישט באַקאַנט מיט די האַנדלינג פון עלעקטראָניש סערקאַץ אַרבעט מיט די MCCAB טראַינינג באָרד, למשל, אין דעם קאָנטעקסט פון טריינינג, אַפּראָופּרייטלי טריינד פּערסאַנעל אין אַ פאַראַנטוואָרטלעך שטעלע מוזן קאָנטראָלירן די אַקטיוויטעטן.
די נוצן פון קינדער אונטער 14 יאר אַלט איז נישט בדעה און מוזן זיין אַוווידאַד. - אויב די MCCAB טראַינינג באָרד ווייזט וואונדער פון שעדיקן (למשל, רעכט צו מעטשאַניקאַל אָדער עלעקטריקאַל דרוק), עס מוזן נישט זיין געוויינט פֿאַר זיכערקייַט סיבות.
- די MCCAB טראַינינג באָרד קען זיין געוויינט בלויז אין אַ ריין און טרוקן סוויווע אין טעמפּעראַטורעס אַרויף צו +40 °C.
2.3 פאַרריכטן און וישאַלט
- צו ויסמיידן שעדיקן צו פאַרמאָג אָדער פערזענלעכע שאָדן, קיין ריפּערז וואָס קען ווערן נויטיק קען נאָר זיין דורכגעקאָכט דורך אַפּראָופּרייטלי טריינד מומכע און ניצן אָריגינעל ספּער טיילן.
- די MCCAB טראַינינג באָרד כּולל קיין באַניצער-סערוויסאַבלע פּאַרץ.
בדעה נוצן
די MCCAB טראַינינג באָרד איז דעוועלאָפּעד פֿאַר פּשוט און שנעל לערנען פון וויסן וועגן פּראָגראַממינג און די נוצן פון אַ מיקראָקאָנטראָללער סיסטעם.
דער פּראָדוקט איז דיזיינד אויסשליסלעך פֿאַר טריינינג און פיר צוועקן. קיין אנדערע נוצן, למשל, אין ינדאַסטריאַל פּראָדוקציע פאַסילאַטיז, איז נישט ערלויבט.
וואָרענען: די MCCAB טראַינינג באָרד איז בלויז בדעה פֿאַר נוצן מיט אַן Arduino® NANO מיקראָקאָנטראָללער סיסטעם (זען פיגורע 2) אָדער אַ מיקראָקאָנטראָללער מאָדולע וואָס איז 100% קאַמפּאַטאַבאַל מיט אים. דעם מאָדולע מוזן זיין אַפּערייטאַד מיט אַ אַפּערייטינג וואַלtagE פון Vcc = +5V. אַנדערש, עס איז אַ ריזיקירן פון יריווערסאַבאַל שעדיקן אָדער צעשטערונג פון די מיקראָקאָנטראָללער מאָדולע, די טריינינג ברעט און די דעוויסעס פארבונדן צו די טריינינג ברעט.
וואָרענען: Voltagעס אין די קייט פון +8 V צו +12 V קען זיין קאָננעקטעד צו די ינפּוץ VX1 און VX2 פון די טריינינג ברעט (זען אָפּטיילונג 4.2 פון דעם מאַנואַל). דער וולtagביי אַלע אנדערע ינפּוץ פון די טריינינג ברעט מוזן זיין אין די קייט פון 0 V צו +5 V.
וואָרענען: די אַפּערייטינג ינסטראַקשאַנז באַשרייַבן ווי צו ריכטיק פאַרבינדן און אַרבעטן די MCCAB טראַינינג באָרד מיט די באַניצער 'ס פּיסי און קיין פונדרויסנדיק מאַדזשולז. ביטע טאָן אַז מיר האָבן קיין השפּעה אויף אַפּערייטינג און / אָדער קשר ערראָרס געפֿירט דורך די באַניצער. דער באַניצער אַליין איז פאַראַנטוואָרטלעך פֿאַר די ריכטיק קשר פון די טריינינג ברעט צו די באַניצער 'ס פּיסי און קיין פונדרויסנדיק מאַדזשולז, ווי געזונט ווי פֿאַר די פּראָגראַממינג און געהעריק אָפּעראַציע! פֿאַר אַלע דאַמידזשיז ריזאַלטינג פון פאַלש קשר, פאַלש קאָנטראָל, פאַלש פּראָגראַממינג און / אָדער פאַלש אָפּעראַציע דער באַניצער איז בלויז פאַראַנטוואָרטלעך! אַכרייַעס קליימז קעגן אונדז זענען פאַרשטיייק יקסקלודיד אין די קאַסעס.
קיין נוצן אנדערע ווי די ספּעסיפיעד איז ניט דערלויבט! די MCCAB טראַינינג באָרד מוזן נישט זיין מאַדאַפייד אָדער קאָנווערטעד, ווייַל דאָס קען שעדיקן עס אָדער ענדיינדזשער די באַניצער (קורץ קרייַז, ריזיקירן פון אָוווערכיטינג און פייַער, ריזיקירן פון עלעקטריש קלאַפּ). אויב פערזענלעכע שאָדן אָדער שעדיקן צו פאַרמאָג אַקערז ווי אַ רעזולטאַט פון ימפּראַפּער נוצן פון די טריינינג ברעט, דאָס איז די איינציקע פֿאַראַנטוואָרטלעכקייט פון דער אָפּעראַטאָר און נישט פון דער פאַבריקאַנט.
די MCCAB טראַינינג באָרד און זייַן קאַמפּאָונאַנץ
פיגורע 1 ווייזט די MCCAB טראַינינג באָרד מיט זייַן קאָנטראָל עלעמענטן. די טריינינג ברעט איז פשוט געשטעלט אויף אַן ילעקטריקלי ניט-קאַנדאַקטיוו אַרבעט ייבערפלאַך און קאָננעקטעד צו די באַניצער 'ס פּיסי דורך אַ מיני-וסב קאַבלע (זען אָפּטיילונג 4.3).
ספּעציעל אין קאָמבינאַציע מיט די "Microcontrollers Hands-On Course for Arduino Starters" (ISBN 978-3-89576-545-2), ארויס דורך Elektor, די MCCAB טראַינינג באָרד איז בישליימעס סוטאַד פֿאַר גרינג און שנעל לערנען פון פּראָגראַממינג און נוצן פון אַ. מיקראָקאָנטראָללער סיסטעם. דער באַניצער קריייץ זיין געניטונג מגילה פֿאַר די MCCAB טראַינינג באָרד אויף זיין פּיסי אין די Arduino IDE, אַ אַנטוויקלונג סוויווע מיט אַן ינאַגרייטיד C / C ++ קאַמפּיילער, וואָס ער קענען אראפקאפיע פריי פֿון די webפּלאַץ 
פיגורע 1: די MCCAB טראַינינג באָרד, רעוו. 3.3
די אַפּערייטינג און אַרויסווייַזן עלעמענטן אויף די MCCAB טראַינינג באָרד:
- 11 × געפירט (סטאַטוס אָנווייַז פֿאַר די ינפּוץ / אַוטפּוץ D2 ... D12)
- כעדער דזשפּ6 פֿאַר קאַנעקטינג די לעדס לד10 ... לד20 מיט די GPIOs D2 ... ד12 אַסיינד צו זיי
- טערמינאַל בלאָק SV5 (דיסטריביאַטער) פֿאַר די ינפּוץ / אַוטפּוץ פון די מיקראָקאָנטראָללער
- RESET קנעפּל
- מיקראָקאָנטראָללער מאָדולע Arduino® NANO (אָדער קאַמפּאַטאַבאַל) מיט מיני וסב כאָלעל
- געפירט "ל", קאָננעקטעד צו GPIO D13
- קאַנעקטער SV6 (דיסטריביאַטער) פֿאַר די מיקראָקאָנטראָללער ינפּוץ / אַוטפּוץ
- פּאָטענטיאָמעטער פּ1
- שטיפט כעדער JP3 פֿאַר סאַלעקטינג די אַפּערייטינג באַנדtagE פון פּאָטענטיאָמעטערס פּ1 און פּ2
- פּאָטענטיאָמעטער פּ2
- שטיפט כעדער דזשפּ4 פֿאַר סאַלעקטינג די סיגנאַל ביי שטיפט X פון קאַנעקטער פּאַס SV12
- קאַנעקטער פּאַס SV12: SPI-Interface 5 V (דער סיגנאַל ביי שטיפט X איז אויסגעקליבן דורך JP4)
- קאַנעקטער פּאַס SV11: SPI צובינד 3.3 V
- טערמינאַל בלאָק SV10: IC צובינד 5 V
- טערמינאַל בלאָק SV8: I2 C צובינד 3.3 V
- טערמינאַל בלאָק SV9: 22 IC צובינד 3.3 V
- טערמינאַל בלאָק SV7: סוויטשינג רעזולטאַט פֿאַר פונדרויסנדיק דעוויסעס
- LC אַרויסווייַזן מיט 2 X 16 אותיות
- 6 × פּושקנעפּ סוויטשיז K1 … K6
- 6 × רוק סוויטשיז S1 … S6
- שטיפט כעדער JP2 פֿאַר קאַנעקטינג די סוויטשאַז צו די ינפּוץ פון די מיקראָקאָנטראָללער.
- טערמינאַל בלאָק SV4: דיסטריביאַטער פֿאַר די אַפּערייטינג באַנדtages
- פּיעזאָ בוזזער בוזזער1
- טערמינאַל בלאָק SV1: סוויטשינג רעזולטאַט פֿאַר פונדרויסנדיק דעוויסעס
- טערמינאַל פּאַס SV3: שפאלטן פון די 3 × 3 געפירט מאַטריץ (אַוטפּוץ D6 … D8 מיט סעריע רעסיסטאָרס 330 Ω)
- קאַנעקטער פּאַס SV2: 2 קס 13 פּינס פֿאַר קאַנעקטינג פונדרויסנדיק מאַדזשולז
- 3 × 3 געפירט מאַטריץ (9 רויט לעדס)
- שפּילקע כעדער JP1 פֿאַר קאַנעקטינג די ראָוז פון די 3 × 3 געפירט מאַטריץ מיט די מיקראָקאָנטראָללער GPIOs D3 … D5
- א דזשאַמפּער אויף די שטעלע "בוזזער" פון די שטיפט כעדער JP6 קאַנעקץ Buzzer1 מיט די GPIO D9 פון די מיקראָקאָנטראָללער.
די יחיד קאָנטראָלס אויף די טריינינג ברעט זענען דערקלערט אין דעטאַל אין די פאלגענדע סעקשאַנז.
4.1 די Arduino® NANO מיקראָקאָנטראָללער מאָדולע
NANO אָדער אַ מיקראָקאָנטראָללער מאָדולע קאַמפּאַטאַבאַל מיט עס איז פּלאַגד אין די MCCAB טראַינינג באָרד (זען פייַל (5) אין פיגורע 1 און פיגורע 2 און מ 1 אין פיגורע 4). דער מאָדולע איז יקוויפּט מיט די אַוור מיקראָקאָנטראָללער ATmega328P, וואָס קאָנטראָלס די פּעריפעראַל קאַמפּאָונאַנץ אויף די טריינינג ברעט. דערצו, עס איז אַן ינאַגרייטיד קאַנווערטער קרייַז אויף די דנאָ זייַט פון די מאָדולע, וואָס קאַנעקץ די סיריאַל צובינד פון די מיקראָקאָנטראָללער UART (וניווערסאַל אַסינטשראָנאָוס ריסיווער טראַנסמיטער) מיט די וסב צובינד פון די פּיסי. דער צובינד איז אויך געניצט צו לאָדן מגילה באשאפן דורך די באַניצער אויף זיין פּיסי אין די מיקראָקאָנטראָללער אָדער צו אַריבערפירן דאַטן צו / פֿון די סיריאַל מאָניטאָר פון די Arduino IDE (אַנטוויקלונג סוויווע). די צוויי לעדס טקס און רקס אין פיגורע 2 אָנווייַזן די דאַטן פאַרקער אויף די סיריאַל שורות TxD און RxD פון די מיקראָקאָנטראָללער. אַן Arduino®

פיגורע 2: מיקראָקאָנטראָללער מאָדולע Arduino® NANO (מקור: www.arduino.cc)
די געפירט ל (זען פיגורע 2 און פייַל (6) אין פיגורע 1 - די באַצייכענונג "ל" קען זיין אַנדערש פֿאַר Arduino NANO קאַמפּאַטאַבאַל קלאָונז) איז פּערמאַנאַנטלי פארבונדן צו די GPIO D13 פון די מיקראָקאָנטראָללער דורך אַ סעריע רעסיסטאָר און ינדיקייץ זייַן שטאַט נידעריק אָדער הויך. די +5 וו וואָלtagדי רעגולאַטאָר אויף די דנאָ זייַט פון די מאָדולע סטייבאַלייזיז די וואָלtage סאַפּלייד ויסווייניק צו די MCCAB טראַינינג באָרד דורך די VIN אַרייַנשרייַב פון די Arduino ® NANO מאָדולע (זען אָפּטיילונג 4.2).
![]() דורך דרינגלעך די RESET קנעפּל אויף שפּיץ פון די Arduino ® NANO מאָדולע (זען פיגורע 2 און פייַל (4) אין פיגורע 1), די מיקראָקאָנטראָללער איז באַשטימט צו אַ דיפיינד ערשט שטאַט און אַ שוין לאָודיד פּראָגראַם איז ריסטאַרטיד. איך אַלע ינפּוץ און אַוטפּוץ פון די מיקראָקאָנטראָללער וואָס זענען וויכטיק פֿאַר די באַניצער זענען פארבונדן צו די צוויי וואָקזאַל סטריפּס SV5 און SV6 (פייַל (3) און פייַל (7) אין פיגורע 1). מיט קאַנעקטערז - אַזוי גערופענע דופּאָנט קאַבלעס (זען פיגורע 3) - די ינפּוץ / אַוטפּוץ פון די מיקראָקאָנטראָללער (אויך גערופן GPIOs = אַלגעמיינע ציל ינפּוץ / אַוטפּוץ) געפירט אויס ביי SV5 און SV6 קענען זיין קאָננעקטעד צו אַפּערייטינג עלעמענטן (קנעפּל, סוויטשיז) , ...) אויף די MCCAB טראַינינג באָרד אָדער צו פונדרויסנדיק פּאַרץ.
דורך דרינגלעך די RESET קנעפּל אויף שפּיץ פון די Arduino ® NANO מאָדולע (זען פיגורע 2 און פייַל (4) אין פיגורע 1), די מיקראָקאָנטראָללער איז באַשטימט צו אַ דיפיינד ערשט שטאַט און אַ שוין לאָודיד פּראָגראַם איז ריסטאַרטיד. איך אַלע ינפּוץ און אַוטפּוץ פון די מיקראָקאָנטראָללער וואָס זענען וויכטיק פֿאַר די באַניצער זענען פארבונדן צו די צוויי וואָקזאַל סטריפּס SV5 און SV6 (פייַל (3) און פייַל (7) אין פיגורע 1). מיט קאַנעקטערז - אַזוי גערופענע דופּאָנט קאַבלעס (זען פיגורע 3) - די ינפּוץ / אַוטפּוץ פון די מיקראָקאָנטראָללער (אויך גערופן GPIOs = אַלגעמיינע ציל ינפּוץ / אַוטפּוץ) געפירט אויס ביי SV5 און SV6 קענען זיין קאָננעקטעד צו אַפּערייטינג עלעמענטן (קנעפּל, סוויטשיז) , ...) אויף די MCCAB טראַינינג באָרד אָדער צו פונדרויסנדיק פּאַרץ.
 פיגורע 3: פאַרשידענע טייפּס פון דופּאָנט קייבאַלז פֿאַר קאַנעקטינג די GPIOs צו די קאָנטראָל עלעמענטן
פיגורע 3: פאַרשידענע טייפּס פון דופּאָנט קייבאַלז פֿאַר קאַנעקטינג די GPIOs צו די קאָנטראָל עלעמענטן
דער באַניצער דאַרף קאַנפיגיער יעדער GPIO פון די Arduino® NANO מיקראָקאָנטראָללער מאָדולע אויף די צוויי קאַנעקטער סטריפּס SV5 און SV6 (פייַל (3) און פייַל (7) אין פיגורע 1), וואָס איז קאָננעקטעד דורך אַ דופּאָנט קאַבלע צו אַ קאַנעקטער אויף די טריינינג ברעט אָדער צו אַ פונדרויסנדיק קאַנעקטער, אין זיין פּראָגראַם פֿאַר די פארלאנגט דאַטן ריכטונג ווי אַרייַנשרייַב אָדער רעזולטאַט!
די דאַטן ריכטונג איז באַשטימט מיט די לימעד
pinMode (gpio, ריכטונג); // פֿאַר "gpio" אַרייַנלייגן די קאָראַספּאַנדינג שטיפט נומער // פֿאַר "ריכטונג" אַרייַנלייגן "INPUT" אָדער "OUTPUT"
Examples:
pinMode (2, רעזולטאַט); // GPIO D2 איז באַשטימט ווי רעזולטאַט
pinMode (13, ינפּוט); // GPIO D13 איז באַשטימט ווי אַרייַנשרייַב
פיגורע 4 ווייזט די וויירינג פון די Arduino® NANO מיקראָקאָנטראָללער מאָדולע M1 אויף די MCCAB טראַינינג באָרד.

פיגורע 4: די וויירינג פון די מיקראָקאָנטראָללער מאָדולע Arduino® NANO אויף די MCCAB טראַינינג באָרד
די מערסט וויכטיק דאַטן פון די מיקראָקאָנטראָללער מאָדולע Arduino® NANO:
| • אַפּערייטינג וואָלtage Vcc: | +5 V |
| • עקסטערנאַל סאַפּלייד אַפּערייטינג וואָלtagאון VIN: | +8 V צו +12 V (זען אָפּטיילונג 4.2) |
| • אַנאַלאָג אַרייַנשרייַב פּינס פון די אַדק: | 8 (AO … A7, זען די ווייַטערדיקע הערות) |
| • דיגיטאַל אַרייַנשרייַב / רעזולטאַט פּינס: | 12 (ד2 … ד13) רעספּ. 16 (זען הערות) |
| • קראַנט קאַנסאַמשאַן פון די נאַנאָ מאָדולע: | אַפּפּראָקס. 20 מאַ |
| • מאַקס. אַרייַנשרייַב / רעזולטאַט קראַנט פון אַ GPIO: | 40 מאַ |
| • סאַכאַקל פון אַרייַנשרייַב / רעזולטאַט קעראַנץ פון אַלע גפּיאָס: | מאַקסימום 200 מאַ |
| • לימעד זכּרון (פלאַש זכּרון): | 32 קב |
| • ארבעטן זכּרון (באַראַן זכּרון): | 2 קב |
| •EEPROM זכּרון: | 1 קב |
| • זייגער אָפטקייַט: | 16 מהז |
| • סיריאַל ינטערפייסיז: | SPI, I2C (פֿאַר UART ויסקומען הערות) |
הערות
- די GPIOs D0 און D1 (שטיפט 2 און שטיפט 1 פון די מאָדולע מ 1 אין פיגורע 4) זענען אַסיינד מיט די סיגנאַלז RxD און TxD פון די UART פון די מיקראָקאָנטראָללער און זענען געניצט פֿאַר די סיריאַל פֿאַרבינדונג צווישן די MCCAB טראַינינג באָרד און די וסב פּאָרט פון די פּיסי. . זיי זענען דעריבער בלויז בנימצא צו דער באַניצער אין אַ לימיטעד מאָס (זען אויך אָפּטיילונג 4.3).
- די GPIOs A4 און A5 (שפּילקע 23 און שטיפט 24 פון די מאָדולע מ 1 אין פיגורע 4) זענען אַסיינד צו די סיגנאַלז SDA און SCL פון די מיקראָקאָנטראָללער ס IC צובינד (זען אָפּטיילונג 4.13) און זענען דעריבער רעזערווירט פֿאַר די סיריאַל קשר צו די LC אַרויסווייַזן אויף די MCCAB טראַינינג באָרד (זען אָפּטיילונג 4.9) און צו פונדרויסנדיק I 2 C מאַדזשולז פארבונדן צו די קאַנעקטער סטריפּס SV8, SV9 און SV10 (אַראָוז (15), (16) און (14) אין פיגורע 1). זיי זענען דעריבער בלויז בנימצא צו דער באַניצער פֿאַר I 2 C אַפּלאַקיישאַנז.
- די פּינס A6 און A7 (שטיפט 25 און שטיפט 26 פון די מיקראָקאָנטראָללער ATmega328P אין פיגורע 4 קענען בלויז זיין געוויינט ווי אַנאַלאָג ינפּוץ פֿאַר די מיקראָקאָנטראָללער אַנאַלאָג / דיגיטאַל קאַנווערטער (ADC). זיי מוזן נישט זיין קאַנפיגיערד דורך די Function pinMode () ווי אַרייַנשרייַב!), דאָס וואָלט פירן צו אַ פאַלש נאַטור פון די סקיצע. A6 און A7 זענען פּערמאַנאַנטלי פארבונדן צו די ווישער טערמינאַלס פון די פּאָטענטיאָמעטערס P1 און P2 (פייַל (8) און פייַל (10) אין פיגורע 1), זען אָפּטיילונג 4.3 .
- די קאַנעקשאַנז A0 ... A3 אויף שטיפט כעדער SV6 (פייַל (7) אין פיגורע 1) זענען אין פּרינציפּ אַנאַלאָג ינפּוץ פֿאַר די אַנאַלאָג / דיגיטאַל קאַנווערטער פון די מיקראָקאָנטראָללער. אָבער, אויב די 12 דיגיטאַל GPIOs D2 … D13 זענען נישט גענוג פֿאַר אַ ספּעציפיש אַפּלאַקיישאַן, A0 … A3 קענען אויך זיין געוויינט ווי דיגיטאַל ינפּוץ / אַוטפּוץ. דערנאָך זיי זענען גערעדט דורך שטיפט נומערן 14 (אַ0) ... 17 (אַ3). 2 עקסamples: pinMode (15, רעזולטאַט); // A1 איז געניצט ווי דיגיטאַל רעזולטאַט פּינמאָדע (17, ינפּוט); // A3 איז געניצט ווי דיגיטאַל אַרייַנשרייַב
- די שטיפט ד12 אויף שטיפט כעדער SV5 (פייַל (3) אין פיגורע 1) און די פּינס D13 און A0 ... A3 אויף שטיפט כעדער SV6 (פייַל (7) אין פיגורע 1) זענען ראַוטיד צו שטיפט כעדער דזשפּ2 (פייַל (21) אין פיגורע 1) און קענען זיין קאָננעקטעד צו די סוויטשיז S1 … S6 אָדער צו די פּושקאַץ K1 … K6 קאָננעקטעד צו זיי אין פּאַראַלעל, זען אויך אָפּטיילונג 4.6. אין דעם פאַל, די ריספּעקטיוו שטיפט מוזן זיין קאַנפיגיערד ווי אַ דיגיטאַל אַרייַנשרייַב מיט די פּינמאָדע לימעד.
אַקיעראַסי פון אַ / ד קאַנווערזשאַן
דיגיטאַל סיגנאַלז אין די מיקראָקאָנטראָללער שפּאָן דזשענערייט ילעקטראָומאַגנעטיק ינטערפערענסעס וואָס קענען ווירקן די אַקיעראַסי פון אַנאַלאָג מעזשערמאַנץ.
אויב איינער פון די GPIOs A0 ... A3 איז געניצט ווי אַ דיגיטאַל רעזולטאַט, עס איז דעריבער וויכטיק אַז דאָס איז נישט יבערבייַט בשעת אַן אַנאַלאָג / דיגיטאַל קאַנווערזשאַן איז גענומען אין אן אנדער אַנאַלאָג אַרייַנשרייַב! א ענדערונג פון די דיגיטאַל רעזולטאַט סיגנאַל ביי A0 … A3 בעשאַס אַן אַנאַלאָג/דיגיטאַל קאַנווערזשאַן אין איינער פון די אנדערע אַנאַלאָג ינפּוץ A0 … A7 קענען פיליפיצירן די רעזולטאַט פון דעם קאַנווערזשאַן.
די נוצן פון די IC צובינד (A4 און A5, זען אָפּטיילונג 4.13) אָדער די GPIOs A0 … A3 ווי דיגיטאַל ינפּוץ טוט נישט ווירקן די קוואַליטעט פון די אַנאַלאָג / דיגיטאַל קאַנווערזשאַנז.
4.2 די מאַכט צושטעלן פון די MCCAB טראַינינג באָרד
די MCCAB טראַינינג באָרד אַרבעט מיט אַ נאָמינאַל אַפּערייטינג דק וואַלtage פון Vcc = +5 V, וואָס איז יוזשאַוואַלי סאַפּלייד צו עס דורך די מיני-וסב כאָלעל פון די Arduino NANO מיקראָקאָנטראָללער מאָדולע פֿון די קאָננעקטעד פּיסי (פיגורע 5, פיגורע 2 און פייַל (5) אין פיגורע 1). זינט די פּיסי איז יוזשאַוואַלי פארבונדן סייַ ווי סייַ פֿאַר די שאַפונג און טראַנסמיסיע פון געניטונג מגילה, דעם טיפּ פון מאַכט צושטעלן איז ידעאַל.
פֿאַר דעם צוועק, די טריינינג ברעט מוזן זיין קאָננעקטעד צו אַ וסב פּאָרט פון די באַניצער 'ס פּיסי דורך אַ מיני-וסב קאַבלע. די פּיסי גיט אַ סטייבאַלייזד דק וואָלtagE פון אַפּפּראָקס. +5 V, וואָס איז גאַלוואַניקאַללי אפגעזונדערט פון די מיינז וואָלtage און קענען זיין לאָודיד מיט אַ מאַקסימום קראַנט פון 0.5 א, דורך זייַן וסב צובינד. די בייַזייַן פון די +5 V אַפּערייטינג וואָלtage איז ינדאַקייטיד דורך די געפירט מיט ON (אָדער POW, PWR) אויף די מיקראָקאָנטראָללער מאָדולע (פיגורע 5, פיגורע 2). די +5 וו וואָלtagדי סאַפּלייד דורך די מיני-וסב כאָלעל איז קאָננעקטעד צו די פאַקטיש אַפּערייטינג באַנדtage Vcc אויף די Arduino NANO מיקראָקאָנטראָללער מאָדולע דורך די פּראַטעקטיוו דייאָוד די.tage Vcc דיקריסאַז אַ ביסל צו Vcc ≈ +4.7 V רעכט צו דער וואָלtagE קאַפּ בייַ די שוץ דייאָוד ד דעם קליין רעדוקציע פון די אַפּערייטינג וואָלtage קען נישט ווירקן די פונקציע פון די Arduino® NANO מיקראָקאָנטראָללער מאָדולע. ® אַלטערנאַטיוועלי, די טריינינג ברעט קענען זיין סאַפּלייד דורך אַ פונדרויסנדיק דק וואָלtagE מקור. דעם באנדtage, געווענדט אָדער צו וואָקזאַל ווקס 1 אָדער צו וואָקזאַל ווקס 2, מוזן זיין אין די קייט וועקסט = +8 … +12 וו.tage איז פעד אין שטיפט 30 (= VIN) פון די Arduino NANO מיקראָקאָנטראָללער מאָדולע אָדער דורך קאַנעקטער SV4 אָדער פֿון אַ פונדרויסנדיק מאָדולע קאָננעקטעד צו קאַנעקטער SV2 (זען פיגורע 5, פיגורע 4 און פייַל (22) אָדער פייַל (26) אין פיגורע 1) . זינט די ברעט איז סאַפּלייד מיט מאַכט פֿון די קאָננעקטעד פּיסי דורך זיין וסב כאָלעל, עס איז ניט מעגלעך צו פאַרקערט די פּאָולעראַטי פון די אָפּערייטינג באַנד.tagE. די צוויי פונדרויסנדיק וולtagדי קאַנעקשאַנז וואָס קענען זיין סאַפּלייד צו די VX1 און VX2 קאַנעקשאַנז זענען דיקאָופּאַלד דורך דייאָודז, ווי געוויזן אין פיגורע 4. 
די דיאָדעס ד2 און ד3 צושטעלן אַ דעקאָופּלינג פון די צוויי פונדרויסנדיק וואָלtagעס איז ביי VX1 און VX2, אין פאַל וואָלtage זאָל זיין געווענדט צו ביידע פונדרויסנדיק ינפּוץ אין דער זעלביקער צייט דורך גרייַז, ווייַל רעכט צו די דיאָדעס בלויז די העכער פון די צווייtagעס קענען דערגרייכן די אַרייַנשרייַב VIN (שפּילקע 30, זען פיגורע 5 און פיגורע 4) פון די Arduino NANO מיקראָקאָנטראָללער מאָדולע מ 1.
די פונדרויסנדיק דק וואָלtage סאַפּלייד צו די מיקראָקאָנטראָללער מאָדולע ביי זיין VIN קאַנעקטער איז רידוסט צו +5 V און סטייבאַלייזד דורך די ינאַגרייטיד וואָל.tage רעגולאַטאָר אויף די דנאָ זייַט פון די מיקראָקאָנטראָללער מאָדולע (זען פיגורע 2). די +5 V אַפּערייטינג וואָלtage דזשענערייטאַד דורך די וואָלtagדי רעגולאַטאָר איז פארבונדן צו די קאַטאָוד פון דייאָוד ד אין פיגורע 5. די אַנאָוד פון די איז אויך פארבונדן צו די +5 V פּאָטענציעל דורך די פּיסי ווען די וסב קשר צו די פּיסי איז פּלאַגד אין. ווירקונג אויף די פונקציע פון די קרייַז. די מאַכט צושטעלן דורך די וסב קאַבלע איז סוויטשט אַוועק אין דעם פאַל. די +3.3 V אַגזיליערי וואָלtage איז דזשענערייטאַד אויף די MCCAB טראַינינג באָרד דורך אַ לינעאַר וואַלtagE רעגולאַטאָר פון די +5 V אַפּערייטינג וואַלtage Vcc פון די מיקראָקאָנטראָללער מאָדולע און קענען צושטעלן אַ מאַקסימום קראַנט פון 200 מאַ.
אָפט אין פּראַדזשעקס, צוטריט צו די אַפּערייטינג וואָלtagעס איז פארלאנגט, למשל, פֿאַר די וואָלtagE צושטעלן פון פונדרויסנדיק מאַדזשולז. פֿאַר דעם צוועק, די MCCAB טראַינינג באָרד גיט די וואָלtagדי דיסטריביאַטער SV4 (פיגורע 4 און פייַל (21) אין פיגורע 1), אויף וואָס צוויי אַוטפּוץ פֿאַר די באַנדtagE +3.3 V און דריי אַוטפּוץ פֿאַר די וואָלtage +5 V און זעקס ערד קאַנעקשאַנז (GND, 0 V) זענען בנימצא אין אַדישאַן צו די קשר שטיפט VX1 פֿאַר די פונדרויסנדיק וואָקtage.
4.3 די וסב קשר צווישן די MCCAB טראַינינג באָרד און די פּיסי
די מגילה וואָס דער באַניצער אַנטוויקלט אין די Arduino IDE (אַנטוויקלונג סוויווע) אויף זיין פּיסי זענען לאָודיד אין די ATmega328P מיקראָקאָנטראָללער אויף די MCCAB טראַינינג באָרד דורך אַ וסב קאַבלע. פֿאַר דעם צוועק, די מיקראָקאָנטראָללער מאָדולע אויף די MCCAB טראַינינג באָרד (פייַל (5) אין פיגורע 1) מוזן זיין קאָננעקטעד צו אַ וסב פּאָרט פון די באַניצער 'ס פּיסי דורך אַ מיני-וסב קאַבלע.
זינט די מיקראָקאָנטראָללער ATmega328P אויף די מיקראָקאָנטראָללער מאָדולע האט נישט זיין אייגענע וסב צובינד אויף זיין שפּאָן, די מאָדולע האט אַן ינאַגרייטיד קרייַז אויף די דנאָ זייַט צו גער די וסב סיגנאַלז D + און D- אין די סיריאַל סיגנאַלז RxD און TxD פון די ATmega328P UART.
דערצו, עס איז מעגלעך צו אַרויספירן דאַטן צו אָדער לייענען דאַטן פֿון די סיריאַל מאָניטאָר ינאַגרייטיד אין די Arduino IDE דורך די UART פון די מיקראָקאָנטראָללער און די סאַבסאַקוואַנט וסב קשר.
פֿאַר דעם צוועק, די ביבליאָטעק "סיריאַל" איז בארעכטיגט פֿאַר דער באַניצער אין די Arduino IDE.
די טריינינג ברעט איז נאָרמאַלי אויך פּאַוערד דורך די וסב צובינד פון די באַניצער 'ס פּיסי (זען אָפּטיילונג 4.2).
עס איז נישט בדעה אַז דער באַניצער ניצט די סיגנאַלז RX און TX פון די מיקראָקאָנטראָללער, וואָס זענען פארבונדן צו די שטיפט כעדער SV5 (פייַל (3) אין פיגורע 1), פֿאַר סיריאַל קאָמוניקאַציע מיט פונדרויסנדיק דעוויסעס (למשל WLAN, בלועטאָאָטה טראַנססעיווערס אָדער ענלעך) , ווייַל דאָס קען שעדיקן די ינאַגרייטיד וסב UART קאַנווערטער קרייַז אויף די דנאָ זייַט פון די מיקראָקאָנטראָללער מאָדולע (זען אָפּטיילונג 4.1) טראָץ די יגזיסטינג פּראַטעקטיוו ריזיסטערז! אויב דער באַניצער טוט עס סייַ ווי סייַ, ער מוזן מאַכן זיכער אַז עס איז קיין קאָמוניקאַציע צווישן די פּיסי און די Arduino NANO מיקראָקאָנטראָללער מאָדולע אין דער זעלביקער צייט! סיגנאַלז סאַפּלייד דורך די וסב כאָלעל וואָלט פירן צו אַ ימפּערמאַנט פון די קאָמוניקאַציע מיט די פונדרויסנדיק מיטל און, אין די ערגסט פאַל, אויך צו אַ שעדיקן צו די ייַזנוואַרג! ®
4.4 די עלף לעדס D2 … D12 פֿאַר סטאַטוס אָנווייַז פון די מיקראָקאָנטראָללער ס גפּיאָס
אין דער נידעריקער לינקס טייל פון פיגורע 1 איר קענען זען די 11 לעדס LED10 ... LED20 (פייַל (1) אין פיגורע 1), וואָס קענען אָנווייַזן די סטאַטוס פון די ינפּוץ / אַוטפּוץ פון די מיקראָקאָנטראָללער (GPIOs) D2 ... D12.
די קאָראַספּאַנדינג קרייַז דיאַגראַמע איז געוויזן אין פיגורע 4.
די ריספּעקטיוו ליכט ימיטינג דייאָוד איז פארבונדן צו די GPIO, אויב אַ דזשאַמפּער איז פּלאַגד אין די קאָראַספּאַנדינג שטעלע פון די שטיפט כעדער דזשפּ6 (פייַל (2) אין פיגורע 1).
אויב די קאָראַספּאַנדינג GPIO D2 … D12 איז אויף הויך מדרגה (+5 V) ווען די דזשאַמפּער אויף JP6 איז פּלאַגד אין, די אַסיינד געפירט לייץ, אויב די GPIO איז נידעריק (GND, 0 V), די געפירט איז סוויטשט אַוועק.
![]() אויב איינער פון די GPIOs D2 ... D12 איז געניצט ווי אַרייַנשרייַב, עס קען זיין נייטיק צו דיאַקטיווייט די געפירט אַסיינד צו עס דורך רימוווינג די דזשאַמפּער צו ויסמיידן אַ מאַסע פון די אַרייַנשרייַב סיגנאַל דורך די אַפּערייטינג קראַנט פון די געפירט (בעערעך 2 ... 3 מאַ).
אויב איינער פון די GPIOs D2 ... D12 איז געניצט ווי אַרייַנשרייַב, עס קען זיין נייטיק צו דיאַקטיווייט די געפירט אַסיינד צו עס דורך רימוווינג די דזשאַמפּער צו ויסמיידן אַ מאַסע פון די אַרייַנשרייַב סיגנאַל דורך די אַפּערייטינג קראַנט פון די געפירט (בעערעך 2 ... 3 מאַ).
דער סטאַטוס פון די GPIO D13 איז ינדאַקייטיד דורך זיין אייגענע געפירט ל גלייַך אויף די מיקראָקאָנטראָללער מאָדולע (זען פיגורע 1 און פיגורע 2). די LED L קענען ניט זיין דיאַקטיווייטיד.
זינט די ינפּוץ / אַוטפּוץ A0 ... A7 זענען בייסיקלי געניצט ווי אַנאַלאָג ינפּוץ פֿאַר די אַנאַלאָג / דיגיטאַל קאַנווערטער פון די מיקראָקאָנטראָללער אָדער פֿאַר ספּעציעל טאַסקס (טווי צובינד), זיי טאָן ניט האָבן אַ דיגיטאַל געפירט סטאַטוס אַרויסווייַזן אין סדר נישט צו פאַרשעדיקן די פאַנגקשאַנז.
4.5 די פּאָטענטיאָמעטערס פּ1 און פּ2
די דריי אַקסעס פון די צוויי פּאָטענטיאָמעטערס פּ 1 און פּ 2 אין די דנאָ פון פיגורע 1 (פייַל (8) און פייַל (10) אין פיגורע 1) קענען ווערן גענוצט צו שטעלן וואָל.tagעס איז אין די קייט 0 ... וופּאָט אין זייער ווייפּער קאַנעקשאַנז.
די וויירינג פון די צוויי פּאָטענטיאָמעטערס קענען זיין געזען אין פיגורע 6.

פיגורע 6: די וויירינג פון די פּאָטענטיאָמעטערס פּ1 און פּ2
די ווייפּער קאַנעקשאַנז פון די צוויי פּאָטענטיאָמעטערס זענען פארבונדן צו די אַנאַלאָג ינפּוץ A6 און A7 פון די Arduino® NANO מיקראָקאָנטראָללער מאָדולע דורך די פּראַטעקטיוו ריזיסטערז R23 און R24.
די דייאָודז D4, D6 אָדער D5, D7 באַשיצן די ריספּעקטיוו אַנאַלאָג אַרייַנשרייַב פון די מיקראָקאָנטראָללער פון צו הויך אָדער נעגאַטיוו וואַלועסtages.
וואָרענען:
די פּינס A6 און A7 פון די ATmega328P זענען שטענדיק אַנאַלאָג ינפּוץ רעכט צו דער ינערלעך שפּאָן אַרקאַטעקטשער פון די מיקראָקאָנטראָללער. זייער קאַנפיגיעריישאַן מיט די פונקציע pinMode () פון די Arduino IDE איז נישט ערלויבט און קענען פירן צו פאַלש נאַטור פון די פּראָגראַם.
דורך די מיקראָקאָנטראָללער ס אַנאַלאָג / דיגיטאַל קאַנווערטער, די שטעלן וואָלtage קענען זיין געמאסטן אויף אַ פּשוט וועג.
Example פֿאַר לייענען די ווערט פון פּאָטענטיאָמעטער פּ1 ביי קשר A6: int z = analogRead(A6);
די 10-ביסל נומעריקאַל ווערט ז, וואָס איז קאַלקיאַלייטיד פון די וואָלtagע ביי א 6 לויט ז =![]() (יקווייזשאַן 1 פון אָפּטיילונג 5) 1024⋅
(יקווייזשאַן 1 פון אָפּטיילונג 5) 1024⋅
דער געוואלט אויבערשטער שיעור וופּאָט = +3.3 וו רעספּ. VPot = +5 V פון די באַשטעטיקן קייט איז באַשטימט מיט די שטיפט כעדער JP3 (פייַל (9) אין פיגורע 1). צו אויסקלייַבן וופּאָט, אָדער שפּילקע 1 אָדער שפּילקע 3 פון JP3 איז קאָננעקטעד צו פּין 2 מיט אַ דזשאַמפּער.
וואָס וואָלtage מוזן זיין באַשטימט מיט JP3 פֿאַר וופּאָט דעפּענדס אויף די רעפֿערענץ וואָלtage VREF פון די אַנאַלאָג / דיגיטאַל קאַנווערטער ביי די REF קאַנעקטער פון די שטיפט כעדער SV6 (פייַל (7) אין פיגורע 1), זען אָפּטיילונג 5.
דער רעפֿערענץ וואָלtage VREF פון די א / ד קאַנווערטער ביי די REF וואָקזאַל פון די SV6 שטיפט כעדער און די באַנדtagE VPot ספּעסיפיעד מיט JP3 מוזן גלייַכן.
4.6 די סוויטשאַז S1 … S6 און די קנעפּלעך K1 … K6
די MCCAB טראַינינג באָרד גיט די באַניצער זעקס פּושקאַץ און זעקס-רוק סוויטשיז פֿאַר זיין עקסערסייזיז (אַראָוז (20) און (19) אין פיגורע 1). פיגורע 7 ווייזט זייער וויירינג. צו געבן די באַניצער די אָפּציע פון אַפּלייינג אָדער אַ שטענדיק אָדער אַ דויפעק סיגנאַל צו איינער פון די ינפּוץ פון די מיקראָקאָנטראָללער מאָדולע מ 1, איין-רוק באַשטימען און איין פּושקנעפּל באַשטימען זענען פארבונדן אין פּאַראַלעל.
דער פּראָסט רעזולטאַט פון יעדער פון די זעקס באַשטימען פּערז איז פארבונדן דורך אַ פּראַטעקטיוו רעסיסטאָר (R25 … R30) צו די שטיפט כעדער דזשפּ2 (פייַל (21) אין פיגורע 1). די פּאַראַלעל פֿאַרבינדונג פון אַ רוק באַשטימען און אַ פּושקנעפּל באַשטימען מיט אַ פּראָסט אַפּערייטינג רעסיסטאָר (ר31 ... ר36) אַקץ ווי אַ לאַדזשיקאַל אָדער אָפּעראַציע: אויב דורך איינער פון די צוויי סוויטשיז (אָדער ביידע סוויטשיז אין דער זעלביקער צייט) די +5 V וואָל.tage איז פאָרשטעלן אין דער פּראָסט אַרבעט רעסיסטאָר, דעם לאַדזשיקאַל הויך מדרגה דורך די פּראַטעקטיוו רעסיסטאָר איז אויך פאָרשטעלן אין די קאָראַספּאַנדינג שטיפט 2, 4, 6, 8, 10 אָדער 12 פון JP2. בלויז ווען ביידע סוויטשיז זענען אָפן, זייער פּראָסט קשר איז אָפן און די קאָראַספּאַנדינג שטיפט פון די שטיפט כעדער JP2 איז פּולד צו נידעריק מדרגה (0 V, GND) דורך די סעריע קשר פון די פּראַטעקטיוו רעסיסטאָר און די ארבעטן רעסיסטאָר.
פיגורע 7: די וויירינג פון די רוק / פּושקנעפּ סוויטשיז S1 … S6 / K1 … K6
יעדער שטיפט פון די שטיפט כעדער JP2 קענען זיין קאָננעקטעד צו זיין אַסיינד אַרייַנשרייַב A0 ... A3, D12 אָדער D13 פון די Arduino
נאַנאָ מיקראָקאָנטראָללער מאָדולע דורך אַ דזשאַמפּער. די אַסיינמאַנט איז געוויזן אין פיגורע 7.
אַלטערנאַטיוועלי, אַ באַשטימען פֿאַרבינדונג אויף פּינס 2, 4, 6, 8, 10 אָדער 12 פון די שטיפט כעדער JP2 קענען זיין קאָננעקטעד צו קיין אַרייַנשרייַב D2 … D13 אָדער A0 … A3 פון די Arduino® מיקראָקאָנטראָללער מאָדולע אויף די שטיפט כעדערז SV5 אָדער SV6 ( פייַל (3) און פייַל (7) אין פיגורע 1) ניצן אַ דופּאָנט קאַבלע. דער פלעקסאַבאַל וועג פון קשר איז בילכער צו די פאַרפעסטיקט אַסיינמאַנט פון יעדער באַשטימען צו אַ ספּעציפיש GPIO אויב די אַסיינד GPIO פון די ATmega328P מיקראָקאָנטראָללער איז געניצט פֿאַר אַ ספּעציעל פֿונקציע (א/ד קאַנווערטער אַרייַנשרייַב, פּוום רעזולטאַט ...). דעם וועג דער באַניצער קענען פאַרבינדן זיין סוויטשיז צו די GPIOs וואָס זענען פריי אין די ריספּעקטיוו אַפּלאַקיישאַן, דאָס הייסט, נישט פאַרנומען דורך אַ ספּעציעל פונקציע.
אין זיין פּראָגראַם, דער באַניצער דאַרף קאַנפיגיער יעדער GPIO פון די Arduino® NANO מיקראָקאָנטראָללער מאָדולע ווי אַרייַנשרייַב, וואָס איז קאָננעקטעד צו אַ באַשטימען פּאָרט, ניצן די לימעד פּינמאָדע (גפּיאָ, ינפּוט); // פֿאַר "gpio" אַרייַנלייגן די קאָראַספּאַנדינג שטיפט נומער
Example: pinMode(A1, INPUT); // A1 איז באַשטימט ווי דיגיטאַל אַרייַנשרייַב פֿאַר S2|K2
אין פאַל אַ GPIO פון די מיקראָקאָנטראָללער קאָננעקטעד צו אַ באַשטימען איז קאַנפיגיערד ווי אַ רעזולטאַט דורך גרייַז, די פּראַטעקטיוו ריזיסטערז R25 … R30 פאַרמייַדן אַ קורץ צווישן +5 V און GND (0 V) ווען די באַשטימען איז אַקטוייטיד און די GPIO האט אַ נידעריק מדרגה אין זייַן פּראָדוקציע.
צו קענען נוצן אַ פּושקנעפּל באַשטימען, די רוק באַשטימען וואָס איז קאָננעקטעד אין פּאַראַלעל צו עס מוזן זיין אָפֿן (שטעלע "0")! אַנדערש, זייער פּראָסט רעזולטאַט איז פּערמאַנאַנטלי אויף הויך מדרגה, ראַגאַרדלאַס פון די שטעלע פון די פּושקנעפּל באַשטימען.
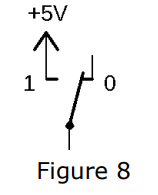
![]() די באַשטימען שטעלעס פון די רוק סוויטשיז זענען אנגעצייכנט "0" און "1" אויף די טריינינג ברעט ווי געוויזן אין פיגורע 1.
די באַשטימען שטעלעס פון די רוק סוויטשיז זענען אנגעצייכנט "0" און "1" אויף די טריינינג ברעט ווי געוויזן אין פיגורע 1.
פיגור 8 ווייזט: אויב די באַשטימען איז אין שטעלע "1", די באַשטימען רעזולטאַט איז קאָננעקטעד צו +5 V (הויך), אין שטעלע "0" די באַשטימען רעזולטאַט איז אָפן.
4.7 די פּיעזאָ בוזזער בוזזער 1
דער אויבערשטער לינקס טייל פון פיגורע 1 ווייזט Buzzer1 (פייַל (23) אין פיגורע 1), וואָס אַלאַוז דער באַניצער צו אַרויסלאָזן טאָנעס פון פאַרשידענע פריקוואַנסיז. זיין יקערדיק סערקיאַליישאַן איז געוויזן אין פיגורע 9.
Buzzer1 קענען זיין קאָננעקטעד צו די GPIO D9 פון די מיקראָקאָנטראָללער אויף די MCCAB טראַינינג באָרד דורך אַ דזשאַמפּער אויף די שטעלע "בוזזער" פון שטיפט כעדער דזשפּ6 (פייַל (29) אין פיגורע 1) (זען פיגורע 9, פיגורע 4 און פייַל (2) אין פיגורע 1). די דזשאַמפּער קענען זיין אַוועקגענומען אויב די GPIO D9 איז דארף אין אַ פּראָגראַם פֿאַר אנדערע צוועקן.
אויב די דזשאַמפּער איז אַוועקגענומען, עס איז אויך מעגלעך צו צולייגן אַ פונדרויסנדיק סיגנאַל צו די שפּילקע 24 פון די שטיפט כעדער דזשפּ6 דורך אַ דופּאָנט קאַבלע און באַקומען עס רעזולטאַט דורך Buzzer1. 
פיגורע 9: די וויירינג פון Buzzer1
צו דזשענערייט טאָנעס, דער באַניצער מוזן דזשענערייט אַ סיגנאַל אין זיין פּראָגראַם וואָס ענדערונגען מיט די געבעטן טאָן אָפטקייַט אין די רעזולטאַט D9 פון די מיקראָקאָנטראָללער (סקיטשט אויף די רעכט אין פיגורע 9).
דעם גיך סיקוואַנס פון הויך און נידעריק לעוועלס אַפּלייז אַ רעקטאַנגגיאַלער אַק וואַלtage צו Buzzer1, וואָס פּיריאַדיקלי דיפאָרמז די סעראַמיק טעלער ין די בוזזער צו פּראָדוצירן געזונט ווייבריישאַנז מיט די צונעמען טאָן אָפטקייַט.
אַן אפילו סימפּלער וועג צו דזשענערייט אַ טאָן איז צו נוצן T/C1 (טיימער / קאָונטער 1) פון די מיקראָקאָנטראָללער: די T/C1 רעזולטאַט OC1A פון די AVR מיקראָקאָנטראָללער ATmega328P אויף די Arduino NANO מיקראָקאָנטראָללער מאָדולע קענען זיין קאָננעקטעד צו GPIO D9 אין די מיקראָקאָנטראָללער. שפּאָן. מיט צונעמען פּראָגראַממינג פון T/C1, עס איז זייער גרינג צו דזשענערייט אַ גראָדעק סיגנאַל וועמענס אָפטקייַט f = ® 1 ?? (ה איז די צייַט פון די גראָדעק סיגנאַל) איז קאָנווערטעד אין דער געוואלט טאָן דורך די בוזזער. פיגור 10 ווייזט אַז אַ פּיעזאָ בוזזער איז נישט אַ הי-פי הילכער. ווי קענען זיין געזען, די אָפטקייַט ענטפער פון אַ פּיעזאָ בוזזער איז אַלץ אָבער לינעאַר. די דיאַגראַמע אין פיגורע 10 ווייזט די געזונט דרוק מדרגה (SPL) פון די פּיעזאָ טראַנסדוסער SAST-2155 פֿון Sonitron געמאסטן אין אַ דיסטאַנסע פון 1 עם ווי אַ פונקציע פון די סיגנאַל אָפטקייַט. רעכט צו פיזיש פּראָפּערטיעס און נאַטירלעך רעזאַנאַנסיז, זיכער פריקוואַנסיז זענען ריפּראַדוסט לאַודער און אנדערע סאַפטער. די קאָראַספּאַנדינג דיאַגראַמע פון די פּיעזאָ בוזזער אויף די MCCAB טראַינינג באָרד ווייזט אַ ענלעך ויסבייג.

פיגורע 10: טיפּיש אָפטקייַט ענטפער פון אַ פּיעזאָ בוזזער (בילד: Sonitron)
טראָץ דעם באַגרענעצונג, אַ פּיעזאָ בוזזער איז אַ גוט קאָמפּראָמיס צווישן די רעפּראָדוקציע קוואַליטעט פון די סאָונדס דזשענערייטאַד דורך די מיקראָקאָנטראָללער און זיין שפּור אויף די ברעט, וואָס אַלאַוז עס צו זיין אַקאַמאַדייטאַד אין אַ קליין פּלאַץ. אין קאַסעס ווען אַ העכער קוואַליטעט פון געזונט רעזולטאַט איז פארלאנגט, די פּיעזאָ בוזזער קענען זיין דיסקאַנעקטיד פון רעזולטאַט D9 דורך רימוווינג די דזשאַמפּער און D9 קענען זיין קאָננעקטעד צו פונדרויסנדיק ויסריכט פֿאַר געזונט רעפּראָדוקציע אויף די שטיפט כעדער SV5, למשל, דורך אַ דופּאָנט קאַבלע (אויב נייטיק). , דורך אַ וואָלtagE דיווידער צו רעדוצירן די ampליטוד צו ויסמייַדן שעדיקן צו די אַרייַנשרייַב סtagאון).
4.8 די 3 × 3 געפירט מאַטריץ
די 9 לעדס אין די לינקס טייל פון פיגורע 1 זענען עריינדזשד אין אַ מאַטריץ מיט 3 שפאלטן און 3 ראָוז (פייַל (27) אין פיגורע 1). זייער קרייַז איז געוויזן אין פיגורע 11. 9 לעדס קענען זיין קאַנטראָולד מיט בלויז 6 גפּיאָס פון די מיקראָקאָנטראָללער רעכט צו דער מאַטריץ אָרדענונג.
די דריי-זייַל שורות א, ב און C זענען פּערמאַנאַנטלי קאָננעקטעד צו די פּינס ד8, ד7 און ד6 פון די מיקראָקאָנטראָללער ווי געוויזן אין פיגורע 11. די דריי רעסיסטאָרס ר 5 ... ר 7 אין די זייַל שורות באַגרענעצן די קראַנט דורך די לעדס. אין דערצו, די זייַל שורות זענען פארבונדן צו די קאַנעקטער SV3 (פייַל (25) אין פיגורע 1).
די דריי-רודערן קאַנעקשאַנז 1, 2 און 3 זענען ראַוטיד צו די שטיפט כעדער JP1 (פייַל (28) אין פיגורע 1). זיי קענען זיין קאָננעקטעד צו די מיקראָקאָנטראָללער פּינס ד3 ... ד5 דורך דזשאַמפּערז. אַלטערנאַטיוועלי, די פּינס 1, 2 אָדער 3 אויף כעדער JP1 קענען זיין קאָננעקטעד דורך דופּאָנט קייבאַלז צו קיין רעזולטאַט D2 … D13 אָדער A0 … A3 פון די Arduino NANO מיקראָקאָנטראָללער מאָדולע אויף ביידע כעדערז SV5 און SV6 (פייַל (3) און פייַל (7) אין פיגורע 1) אויב איינער פון די אַסיינד GPIOs D3 … D5 פון די מיקראָקאָנטראָללער ATmega328P אויף די Arduino ® NANO מיקראָקאָנטראָללער מאָדולע איז געניצט פֿאַר אַ ספּעציעל פונקציע. די 9 לעדס זענען לייבאַלד A1 … C3 לויט זייער אָרדענונג אין די מאַטריץ, למשל, LED B1 איז ליגן אין זייַל שורה ב און אין די שורה שורה 1.
 פיגורע 11: די נייַן לעדס אין פאָרעם פון אַ 3 × 3 מאַטריץ
פיגורע 11: די נייַן לעדס אין פאָרעם פון אַ 3 × 3 מאַטריץ
די לעדס זענען יוזשאַוואַלי קאַנטראָולד דורך די באַניצער פּראָגראַם אין אַ סאָף שלייף, אין וואָס איינער פון די דריי ראָוז 1, 2 און 3 איז סיקליקלי באַשטימט צו נידעריק פּאָטענציעל, בשעת די אנדערע צוויי ראָוז זענען באַשטימט צו הויך מדרגה אָדער אין אַ הויך ימפּידאַנס. שטאַט (הי-ז). אויב איינער אָדער מער פון די לעדס אין די רודערן איצט אַקטיווייטיד דורך נידעריק מדרגה זאָל זיין ליט, זייַן זייַל וואָקזאַל א, ב אָדער C איז באַשטימט צו הויך מדרגה. די זייַל טערמינאַלס פון די לעדס אין די אַקטיוו רודערן וואָס זענען נישט צו זיין ליט זענען ביי נידעריק פּאָטענציעל. פֿאַר עקסampליי, צו מאַכן ביידע לעדס A3 און C3 ליכט אַרויף, רודערן 3 מוזן זיין אויף נידעריק מדרגה און שפאלטן א און C מוזן זיין אויף הויך מדרגה, בשעת זייַל ב איז אויף נידעריק מדרגה און ביידע רודערן שורות 1 און 2 זענען אויף הויך מדרגה אָדער אין הויך ימפּידאַנס שטאַט (Hi-Z).
![]() וואָרענען: אויב די רודערן שורות פון די 3 × 3 געפירט מאַטריץ זענען אָדער קאָננעקטעד צו די GPIOs D3 ... D5 דורך דזשאַמפּערז אויף די שטיפט כעדער JP1 אָדער צו אנדערע GPIOs פון די מיקראָקאָנטראָללער דורך Dupont קייבאַלז, די רודערן שורות און די זייַל שורות D6 ... D8 מוזן קיינמאָל זיין געוויינט פֿאַר אנדערע טאַסקס אין אַ פּראָגראַם. א טאָפּל אַסיינמאַנט פון די מאַטריץ GPIOs וואָלט פירן צו מאַלפאַנגקשאַנז אָדער אפילו שעדיקן צו די טריינינג ברעט!
וואָרענען: אויב די רודערן שורות פון די 3 × 3 געפירט מאַטריץ זענען אָדער קאָננעקטעד צו די GPIOs D3 ... D5 דורך דזשאַמפּערז אויף די שטיפט כעדער JP1 אָדער צו אנדערע GPIOs פון די מיקראָקאָנטראָללער דורך Dupont קייבאַלז, די רודערן שורות און די זייַל שורות D6 ... D8 מוזן קיינמאָל זיין געוויינט פֿאַר אנדערע טאַסקס אין אַ פּראָגראַם. א טאָפּל אַסיינמאַנט פון די מאַטריץ GPIOs וואָלט פירן צו מאַלפאַנגקשאַנז אָדער אפילו שעדיקן צו די טריינינג ברעט!
4.9 די LC-Display (LCD)
אין די שפּיץ רעכט פון פיגורע 1 איז די LC אַרויסווייַזן (LCD) פֿאַר ווייַזנדיק טעקסט אָדער נומעריקאַל וואַלועס (פייַל (18) אין פיגורע 1). די לקד האט צוויי ראָוז; יעדער רודערן קענען אַרויסווייַזן 16 אותיות. זייַן קרייַז איז געוויזן אין פיגורע 12.
דער פּלאַן פון די לק אַרויסווייַזן קענען בייַטן דיפּענדינג אויף דער פאַבריקאַנט, למשל, ווייַס אותיות אויף אַ בלוי הינטערגרונט אָדער שוואַרץ אותיות אויף אַ געל הינטערגרונט אָדער אן אנדער אויסזען איז מעגלעך.
זינט די לקד איז ניט דארף אין אַלע מגילה, די +5 V אַפּערייטינג וואָלtagדי לקד קענען זיין ינטעראַפּטיד דורך פּולינג די דזשאַמפּער אויף די שטיפט כעדער JP5 אויב די באַקלייט פון די לקד זאָל אַרייַנמישנ זיך.
 פיגורע 12: די קאַנעקשאַנז פון די לק אַרויסווייַזן
פיגורע 12: די קאַנעקשאַנז פון די לק אַרויסווייַזן
קאַנטראַסט באַשטעטיקן
![]() די קוינע פון די MCCAB טראַינינג באָרד מוזן סטרויערן די קאַנטראַסט פון די לק אַרויסווייַזן בעשאַס דער ערשטער אָנהייב-אַרויף! צו טאָן דאָס, אַ טעקסט איז רעזולטאַט צו די לקד און די קאַנטראַסט איז אַדזשאַסטיד דורך טשאַנגינג די טרימינג רעסיסטאָר געוויזן אין פיגורע 13 (ווייַס פייַל צייכן אין פיגורע 13) מיט אַ שרויפנ - ציער פֿון די דנאָ פון די טריינינג ברעט אַזוי אַז די אותיות אויף די אַרויסווייַזן זענען געוויזן אָפּטימאַללי.
די קוינע פון די MCCAB טראַינינג באָרד מוזן סטרויערן די קאַנטראַסט פון די לק אַרויסווייַזן בעשאַס דער ערשטער אָנהייב-אַרויף! צו טאָן דאָס, אַ טעקסט איז רעזולטאַט צו די לקד און די קאַנטראַסט איז אַדזשאַסטיד דורך טשאַנגינג די טרימינג רעסיסטאָר געוויזן אין פיגורע 13 (ווייַס פייַל צייכן אין פיגורע 13) מיט אַ שרויפנ - ציער פֿון די דנאָ פון די טריינינג ברעט אַזוי אַז די אותיות אויף די אַרויסווייַזן זענען געוויזן אָפּטימאַללי.
אויב אַ ריאַדזשאַסטמאַנט איז נייטיק רעכט צו טעמפּעראַטור פלאַקטשויישאַנז אָדער יידזשינג, דער באַניצער קענען ריכטיק די לקד קאַנטראַסט דורך אַדזשאַסטינג דעם טרימינג רעסיסטאָר אויב נייטיק.
 פיגורע 13: אַדזשאַסטמאַנט פון די לקד קאַנטראַסט מיט אַ שרויפנ - ציער
פיגורע 13: אַדזשאַסטמאַנט פון די לקד קאַנטראַסט מיט אַ שרויפנ - ציער
טראַנסמיסיע פון די דאַטן צו די לק-ווייַז
די LC-Display איז קאַנטראָולד דורך די סיריאַל TWI (= I2 C) צובינד פון די מיקראָקאָנטראָללער ATmega328P. קאַנעקטער A4 אויף שטיפט כעדער SV6 (פייַל (7) אין פיגורע 1) פאַנגקשאַנז ווי דאַטן שורה SDA (סיריאַל דאַטאַ) און A5 ווי זייגער שורה SCL (סיריאַל זייגער).
![]() די LC אַרויסווייַזן אויף די MCCAB טראַינינג באָרד נאָרמאַלי האט די I2 C אַדרעס 0x27.
די LC אַרויסווייַזן אויף די MCCAB טראַינינג באָרד נאָרמאַלי האט די I2 C אַדרעס 0x27.
אויב אן אנדער אַדרעס זאָל זיין געוויינט רעכט צו מאַנופאַקטורינג סיבות, דעם אַדרעס איז ינדאַקייטיד דורך אַ סטיקער אויף די אַרויסווייַזן. אין דער באַניצער ס סקיצע, דעם אַדרעס מוזן זיין געוויינט אַנשטאָט פון די אַדרעס 0x27.
די קאַנטראָולער אינסטאַלירן אויף די לק אַרויסווייַזן איז קאַמפּאַטאַבאַל מיט די וויידלי געוויינט ינדאַסטרי סטאַנדאַרט HD44780, פֿאַר וואָס עס זענען אַ גרויס נומער פון Arduino לייברעריז (למשל, https://github.com/marcoschwartz/LiquidCrystal_I2C) אויף דער אינטערנעץ פֿאַר קאָנטראָל דורך די
IC2 ויטאָבוס. די לייברעריז קענען יוזשאַוואַלי זיין דאַונלאָודיד פריי פון די ריספּעקטיוו webפּלאַץ.
4.10 דער שאָפער אַוטפּוץ SV1 און SV7 פֿאַר העכער רעזולטאַט קעראַנץ און וואָלtages
די שטיפט כעדערז SV1 (פייַל (24) אין פיגורע 1) און SV7 (פייַל (17) אין פיגורע 1) קענען ווערן גענוצט צו באַשטימען אויף און אַוועק לאָודז וואָס דאַרפן העכער קעראַנץ ווי די אַפּפּראָקס. 40 מאַ אַז אַ נאָרמאַל מיקראָקאָנטראָללער רעזולטאַט קענען צושטעלן ווי אַ מאַקסימום. די אַפּערייטינג וואָלtagדי פונדרויסנדיק מאַסע קענען זיין אַרויף צו +24 וו און די רעזולטאַט קראַנט קענען זיין אַרויף צו 160 מאַ. דאָס מאכט עס מעגלעך צו קאָנטראָלירן קלענערער מאָטאָרס (למשל פאָכער מאָטאָרס), רילייז אָדער קלענערער באַלבז גלייַך מיט די מיקראָקאָנטראָללער פון די טריינינג ברעט.
פיגורע 14 ווייזט די קרייַז דיאַגראַמע פון די צוויי שאָפער אַוטפּוץ.
פיגורע 14: דער שאָפער אַוטפּוץ SV1 און SV7 פֿאַר העכער רעזולטאַט קעראַנץ
די דאַשט געביטן אין פיגורע 14 ווייַזן ווי לאָודז זענען פארבונדן צו די שאָפער רעזולטאַט, ניצן די עקסampאַ רעלע און אַ מאָטאָר:
- די positive פלאָקן פון די פונדרויסנדיק אַפּערייטינג וואָלtagE איז פארבונדן צו שטיפט 3 (לייבאַלד "+" אויף די ברעט) פון כעדער SV1 רעספּ. SV7. די מער positive פֿאַרבינדונג פון די מאַסע איז אויך פארבונדן צו שטיפט 3 פון די שטיפט כעדער SV1 אָדער SV7.
- די מער נעגאַטיוו קשר פון די מאַסע איז קאָננעקטעד צו שטיפט 2 (לייבאַלד "S" אויף די ברעט) פון כעדער SV1 רעספּ. SV7.
- די נעגאַטיוו פלאָקן פון די פונדרויסנדיק אַפּערייטינג וואָלtage איז פארבונדן צו שטיפט 1 (לייבאַלד "" אויף די ברעט) פון כעדער SV1 רעספּ. SV7.
דער שאָפער סtage SV1 איז פּערמאַנאַנטלי קאָננעקטעד צו די GPIO D3 פון די מיקראָקאָנטראָללער און די שאָפער stage SV7 איז פּערמאַנאַנטלי קאָננעקטעד צו די GPIO D10 פון די מיקראָקאָנטראָללער. זינט D3 און D10 זענען PWM-טויגעוודיק אַוטפּוץ פון די מיקראָקאָנטראָללער, עס איז מעגלעך צו לייכט קאָנטראָלירן, למשלample, די גיכקייַט פון אַ קאָננעקטעד דק מאָטאָר אָדער די ברייטנאַס פון אַ ליכט ציבעלע. די פּראַטעקטיוו דייאָודז ד 1 און ד 8 ינשור אַז וואָלtagדי פּיקס, וואָס פאַלן ווען סוויטשינג אַוועק ינדוקטיווע לאָודז, קענען נישט שעדיקן די רעזולטאַט סtage.
א הויך סיגנאַל ביי רעזולטאַט D3 פון די מיקראָקאָנטראָללער סוויטשיז אויף טראַנזיסטאָר ט 2 און די מער נעגאַטיוו קשר פון די מאַסע ביי SV1 איז פארבונדן צו ערד (GND) דורך סוויטשינג טראַנזיסטאָר ט 2. אזוי, די מאַסע איז סוויטשט אויף, ווייַל די גאנצע פונדרויסנדיק אַפּערייטינג וואָלtagע איצט דראָפּס אַוועק אין עס.
א נידעריק סיגנאַל ביי D3 בלאַקס טראַנזיסטאָר ט 2 און די מאַסע קאָננעקטעד צו SV1 איז סוויטשט אַוועק. דער זעלביקער אַפּלייז צו די רעזולטאַט D10 פון די מיקראָקאָנטראָללער און די כעדער SV7.
4.11 די SV2 כאָלעל קאַנעקטער פֿאַר פֿאַרבינדונג פונדרויסנדיק מאַדזשולז
דורך כאָלעל קאַנעקטער SV2 (פייַל (26) אין פיגורע 1) פונדרויסנדיק מאַדזשולז און געדרוקט קרייַז באָרדז קענען זיין דאַקט צו די MCCAB טראַינינג באָרד. די מאַדזשולז קענען זיין סענסער באָרדז, דיגיטאַל / אַנאַלאָג קאַנווערטערז, WLAN אָדער ראַדיאָ מאַדזשולז, גראַפיק דיספּלייז אָדער סערקאַץ צו פאַרגרעסערן די נומער פון אַרייַנשרייַב / רעזולטאַט שורות, צו נאָמען בלויז אַ ביסל פון די פילע אָפּציעס. אפילו גאַנץ אַפּלאַקיישאַן מאָדעלס, אַזאַ ווי טריינינג מאַדזשולז פֿאַר קאָנטראָל ינזשעניעריע אָדער פאַרקער ליכט קאָנטראָל, וואָס דאַרפן פילע GPIOs פֿאַר זייער קאָנטראָל, קענען זיין קאָננעקטעד צו די SV2 כאָלעל קאַנעקטער פון די MCCAB טראַינינג באָרד און קאַנטראָולד דורך זיין מיקראָקאָנטראָללער. די ווייַבלעך קאַנעקטער פּאַס SV2 באשטייט פון 26 קאָנטאַקטן, וואָס זענען עריינדזשד אין 2 ראָוז פון 13 קאָנטאַקטן יעדער. די מאָדנע-נומערד קאָנטאַקטן זענען אין דער אויבערשטער רודערן, די אפילו-נומערד קאָנטאַקטן זענען אין דער נידעריקער רודערן פון די SV2 כאָלעל פּאַס.
 פיגורע 15: שטיפט אַסיינמאַנט פון כאָלעל קאַנעקטער SV2
פיגורע 15: שטיפט אַסיינמאַנט פון כאָלעל קאַנעקטער SV2
די שטיפט אַסיינמאַנט פון SV2 ווייזט פיגורע 15. אַלע קאַנעקשאַנז באַטייַטיק פֿאַר אַ פונדרויסנדיק מאָדולע אויף די MCCAB טראַינינג באָרד זענען געפירט אויס צו די כאָלעל פּאַס SV2.
די GPIOs D0 און D1 (RxD און TxD) און די אַנאַלאָג ינפּוץ A6 און A7 זענען נישט קאָננעקטעד צו SV2, ווייַל D0 און D1 זענען רעזערווירט פֿאַר די סיריאַל פֿאַרבינדונג צווישן די MCCAB טראַינינג באָרד און די פּיסי און זענען בלויז בנימצא צו דער באַניצער אין אַ זייער לימיטעד וועג (זען נאָטעס אין אָפּטיילונג 4.1) און A6 און A7 זענען פּערמאַנאַנטלי קאָננעקטעד צו די ווייפּער טערמינאַלס פון די פּאָטענטיאָמעטערס P1 און P2 אויף די MCCAB טראַינינג באָרד (זען אָפּטיילונג 4.3) און דעריבער קענען ניט זיין געוויינט אַנדערש.
![]() אין זיין פּראָגראַם, דער באַניצער דאַרף קאַנפיגיער יעדער GPIO פון די Arduino NANO מיקראָקאָנטראָללער מאָדולע אויף די צוויי שטיפט כעדערז SV5 און SV6 (פייַל (3) און פייַל (7) אין פיגורע 1), וואָס איז געניצט דורך אַ פונדרויסנדיק מאָדולע אויף SV2, פֿאַר די פארלאנגט דאַטן ריכטונג ווי ינפּוט אָדער רעזולטאַט (זען אָפּטיילונג 4.1)! ®
אין זיין פּראָגראַם, דער באַניצער דאַרף קאַנפיגיער יעדער GPIO פון די Arduino NANO מיקראָקאָנטראָללער מאָדולע אויף די צוויי שטיפט כעדערז SV5 און SV6 (פייַל (3) און פייַל (7) אין פיגורע 1), וואָס איז געניצט דורך אַ פונדרויסנדיק מאָדולע אויף SV2, פֿאַר די פארלאנגט דאַטן ריכטונג ווי ינפּוט אָדער רעזולטאַט (זען אָפּטיילונג 4.1)! ®
![]() וואָרענען: GPIOs פון די מיקראָקאָנטראָללער ATmega328P אויף די MCCAB טראַינינג באָרד, וואָס זענען געניצט דורך אַ מאָדולע קאָננעקטעד צו SV2, מוזן נישט זיין געוויינט פֿאַר אנדערע טאַסקס אין אַ פּראָגראַם. א טאָפּל אַסיינמאַנט פון די GPIOs וואָלט פירן צו מאַלפאַנגקשאַנז אָדער אפילו שעדיקן פון די טריינינג ברעט!
וואָרענען: GPIOs פון די מיקראָקאָנטראָללער ATmega328P אויף די MCCAB טראַינינג באָרד, וואָס זענען געניצט דורך אַ מאָדולע קאָננעקטעד צו SV2, מוזן נישט זיין געוויינט פֿאַר אנדערע טאַסקס אין אַ פּראָגראַם. א טאָפּל אַסיינמאַנט פון די GPIOs וואָלט פירן צו מאַלפאַנגקשאַנז אָדער אפילו שעדיקן פון די טריינינג ברעט!
4.12 די שטיפט כעדערז פֿאַר די קשר פון SPI מאַדזשולז
די שטיפט כעדערז SV11 (פייַל (13) אין פיגורע 1) און SV12 (פייַל (12) אין פיגורע 1) קענען זיין געוויינט צו פאַרבינדן די MCCAB טראַינינג באָרד ווי SPI בעל מיט פונדרויסנדיק שקלאַף מאַדזשולז וואָס האָבן אַ SPI צובינד (SPI = סיריאַל פּעריפעראַל) צובינד). די סיריאַל פּעריפעראַל צובינד אַלאַוז אַ שנעל סינטשראָנאָוס דאַטן אַריבערפירן צווישן די טריינינג ברעט און די פּעריפעראַל מאָדולע.
די AVR מיקראָקאָנטראָללער ATmega328P האט אַ ייַזנוואַרג SPI אויף זיין שפּאָן, וועמענס סיגנאַלז SS, MOSI, MISO און SCLK קענען זיין קאָננעקטעד אין די מיקראָקאָנטראָללער שפּאָן צו די GPIOs D10 … D13 אויף די שטיפט כעדערז SV5 און SV6 (פייַל (3) און פייַל (7) ) אין פיגורע 1).
אין די Arduino IDE, די SPI ביבליאָטעק איז בארעכטיגט פֿאַר קאָנטראָל פון SPI מאַדזשולז, וואָס איז ינאַגרייטיד אין די באַניצער פּראָגראַם מיט # ינקלודע
 פיגורע 16: שטיפט אַסיינמאַנט פון SPI קאַנעקטער SV11
פיגורע 16: שטיפט אַסיינמאַנט פון SPI קאַנעקטער SV11
זינט ספּי מאַדזשולז מיט אַפּערייטינג וואָלtagE +3.3 V און SPI מאַדזשולז מיט אַפּערייטינג וואָלtage +5 V זענען פּראָסט, די MCCAB טראַינינג באָרד אָפפערס מיט SV11 און SV12 צוויי קאָראַספּאַנדינג ווייערד קשר סטריפּס צו דעקן ביידע אָפּציעס.
![]() אויב אַ דזשאַמפּער קורצע הייזלעך פּינס 2 און 3 פון כעדער דזשפּ4 (זען פיגורע 17 אויבן), ביידע SPI ינטערפייסיז SV11 און SV12 נוצן די זעלבע רעזולטאַט שפּילקע D10 פון די מיקראָקאָנטראָללער ווי SS (סלאַוו סעלעקט) שורה, ווי פיגורע 16 און פיגורע 17 ווייַזן! דעריבער, בלויז איינער פון די צוויי קאַנעקטערז SV11 אָדער SV12 קען זיין קאָננעקטעד צו אַ SPI מאָדולע אין דער זעלביקער צייט, ווייַל די סיימאַלטייניאַס נוצן פון דער זעלביקער סס שורה פֿאַר פאַרשידענע דעוויסעס וואָלט פירן צו טראַנסמיסיע ערראָרס און קורץ סערקאַץ אויף די SPI שורות! אָפּטיילונג 4.12.3 ווייזט אַ מעגלעכקייט ווי פונדעסטוועגן צוויי SPI סלאַוועס קענען זיין קאָננעקטעד צו SV11 און SV12 אין דער זעלביקער צייט.
אויב אַ דזשאַמפּער קורצע הייזלעך פּינס 2 און 3 פון כעדער דזשפּ4 (זען פיגורע 17 אויבן), ביידע SPI ינטערפייסיז SV11 און SV12 נוצן די זעלבע רעזולטאַט שפּילקע D10 פון די מיקראָקאָנטראָללער ווי SS (סלאַוו סעלעקט) שורה, ווי פיגורע 16 און פיגורע 17 ווייַזן! דעריבער, בלויז איינער פון די צוויי קאַנעקטערז SV11 אָדער SV12 קען זיין קאָננעקטעד צו אַ SPI מאָדולע אין דער זעלביקער צייט, ווייַל די סיימאַלטייניאַס נוצן פון דער זעלביקער סס שורה פֿאַר פאַרשידענע דעוויסעס וואָלט פירן צו טראַנסמיסיע ערראָרס און קורץ סערקאַץ אויף די SPI שורות! אָפּטיילונג 4.12.3 ווייזט אַ מעגלעכקייט ווי פונדעסטוועגן צוויי SPI סלאַוועס קענען זיין קאָננעקטעד צו SV11 און SV12 אין דער זעלביקער צייט.
4.12.1 די צובינד SV11 פֿאַר SPI מאַדזשולז מיט +3.3 V אַפּערייטינג וואָלtage
די קאַנעקטער SV11 (פייַל (13) אין פיגורע 1) ינייבאַלז דער באַניצער צו פאַרלייגן אַ סיריאַל SPI פֿאַרבינדונג (SPI = סיריאַל פּעריפעראַל צובינד) צווישן די MCCAB טראַינינג באָרד און אַ פונדרויסנדיק SPI מאָדולע מיט +3.3 V אַפּערייטינג וואָק.tagE, ווייַל די לעוועלס פון די SPI רעזולטאַט סיגנאַלז SS, MOSI און SCLK ביי די צובינד SV11 זענען רידוסט צו 3.3 V דורך voltagE דיווידערס. א 3.3 V מדרגה אויף די SPI אַרייַנשרייַב שורה מיסאָ איז אנערקענט ווי הויך סיגנאַל דורך די אַוור מיקראָקאָנטראָללער ATmega328P און דעריבער דאַרף ניט זיין אויפגעהויבן צו 5 V מדרגה. די וויירינג פון SV11 איז געוויזן אין פיגורע 16.
4.12.2 די צובינד SV12 פֿאַר SPI מאַדזשולז מיט +5 V אַפּערייטינג וואָלtage
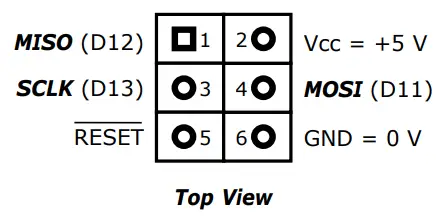
צובינד SV12 (פייַל (12) אין פיגורע 1) ינייבאַלז דער באַניצער צו פאַרלייגן אַ סיריאַל SPI פֿאַרבינדונג צווישן די MCCAB טראַינינג באָרד און אַ פונדרויסנדיק SPI שקלאַף מיט + 5 V אַפּערייטינג באַנדtagE, ווייַל די סיגנאַלז SS, MOSI, MISO און SCLK פון צובינד SV12 אַרבעטן מיט 5 V סיגנאַל לעוועלס.
די וויירינג פון SV12 איז געוויזן אין פיגורע 17. 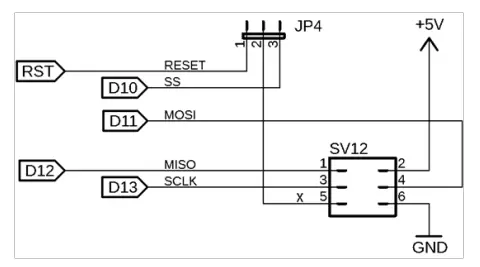
פיגורע 17: שטיפט אַסיינמאַנט פון SPI קאַנעקטער SV12
די שטיפט אָרדענונג אויף שטיפט כעדער SV12 קאָראַספּאַנדז צו די רעקאַמענדיד שטיפט אַסיינמאַנט פון די AVR פּראָגראַממינג צובינד פון די AVR פאַבריקאַנט מיקראָטשיפּ, וואָס איז געוויזן אין פיגורע 18. דאָס גיט דער באַניצער די מעגלעכקייט צו ריפּראָגראַם די באָאָטלאָאַדער פון די ATmega328P מיט אַ פּאַסיק פּראָגראַממינג מיטל דורך. די SPI צובינד, למשל, אויב עס דאַרף אַ דערהייַנטיקן צו אַ נייַע ווערסיע אָדער איז אויסגעמעקט דורך גרייַז.
 פיגורע 18: רעקאַמענדיד שטיפט אַסיינמאַנט פון די אַוור פּראָגראַממינג צובינד
פיגורע 18: רעקאַמענדיד שטיפט אַסיינמאַנט פון די אַוור פּראָגראַממינג צובינד
סעלעקציע פון סיגנאַל X ביי שפּילקע 5 פון SV12
דעפּענדינג אויף די געבעטן אַפּלאַקיישאַן, די קשר X ביי שפּילקע 5 פון SV12 (פיגורע 17) קענען זיין אַסיינד מיט פאַרשידענע סיגנאַלז:
- א דזשאַמפּער קאַנעקץ פּינס 2 און 3 פון שטיפט כעדער JP4.
אויב די פּינס 2 און 3 פון שטיפט כעדער דזשפּ4 (זען פיגורע 17 אויבן און פייַל (11) אין פיגורע 1) זענען שאָרטיד דורך אַ דזשאַמפּער, די GPIO D10 (סיגנאַל סס) פון די מיקראָקאָנטראָללער איז קאָננעקטעד צו שטיפט 5 פון די קאַנעקטער SV12. SV12 איז געניצט ווי אַ נאָרמאַל ספּי צובינד מיט די SS (Slave Select) GPIO D10.
אין דעם פאַל, ביידע SPI ינטערפייסיז SV11 און SV12 נוצן די זעלבע SS שורה D10! דעריבער, בלויז איינער פון די צוויי קאַנעקטער סטריפּס SV11 אָדער SV12 קען זיין קאָננעקטעד צו אַ SPI מאָדולע, ווייַל די סיימאַלטייניאַס נוצן פון דער זעלביקער סס שורה דורך פאַרשידענע דעוויסעס וואָלט פירן צו טראַנסמיסיע ערראָרס און קורץ סערקאַץ אויף די SPI שורות! - א דזשאַמפּער קאַנעקץ פּינס 1 און 2 פון שטיפט כעדער JP4. אין דעם פאַל, די באַשטעטיק שורה פון די מיקראָקאָנטראָללער איז קאָננעקטעד צו שטיפט 5 פון שטיפט כעדער SV12. אין דעם מאָדע SV12 אקטן ווי אַ פּראָגראַממינג צובינד פֿאַר די מיקראָקאָנטראָללער ATmega328P, ווייַל פֿאַר די פּראָגראַממינג פּראָצעס די RESET שורה פון די ATmega328P מוזן זיין קאָננעקטעד צו שטיפט X (שפּילקע 5) פון שטיפט כעדער SV12. אין דעם מאָדע, די ATmega328P איז די SPI שקלאַף און די פונדרויסנדיק פּראָגראַמיסט איז דער בעל.
4.12.3 סיימאַלטייניאַס קשר פון SPI מאַדזשולז צו SV11 און SV12
אויב עס איז אַ נויט צו פאַרבינדן אַ 3.3 V מאָדולע און אַ 5 V מאָדולע צו די MCCAB טראַינינג באָרד אין דער זעלביקער צייט, דאָס קענען זיין איינגעזען מיט די וויירינג געוויזן אין פיגורע 19. פּינס 1 און 3 פון די שטיפט כעדער JP4 זענען אַנקאַנעקטיד, שטיפט 2 פון דזשפּ4 איז קאָננעקטעד צו איינער פון די דיגיטאַל גפּיאָס ד2 … ד9 אויף שטיפט כעדער סו 5 (פייַל (3) אין פיגורע 1) דורך אַ דופּאָנט קאַבלע, ווי געוויזן אין פיגורע 19. דער רעזולטאַט פון די מיקראָקאָנטראָללער ATmega328P דערפילט די אַרבעט פון אַן נאָך סס סיגנאַל ביי קאַנעקטער X (שפּילקע 5) פון די שטיפט כעדער SV12. פיגורע 19 ווייזט די פּראָצעדור ניצן די עקסample פון D9 ווי נאָך קאַנעקטער SS2. 
פיגורע 19: סיימאַלטייניאַס קשר פון צוויי SPI מאַדזשולז צו די MCCAB טראַינינג באָרד אין דעם פאַל, ביידע SPI ינטערפייסיז SV11 און SV12 קען זיין קאָננעקטעד צו פונדרויסנדיק SPI סלאַוועס אין דער זעלביקער צייט, ווייַל ביידע SV11 און SV12 נוצן פאַרשידענע סס שורות איצט: נידעריק מדרגה ביי GPIO D10 אַקטאַווייץ די SPI מאָדולע ביי SV11 און נידעריק מדרגה ביי GPIO D9 אַקטאַווייץ די SPI מאָדולע ביי SV12 (זען פיגורע 19).
די מיקראָקאָנטראָללער אויף די MCCAB טראַינינג באָרד קען בלויז וועקסל דאַטן מיט איין מאָדולע קאָננעקטעד צו די ויטאָבוס דורך SV11 אָדער SV12 אין דער זעלביקער צייט. ווי איר קענען זען אין פיגורע 19, די MISO שורות פון ביידע ינטערפייסיז SV11 און SV12 זענען פארבונדן צוזאַמען. אויב ביידע ינטערפייסיז וואָלט זיין אַקטיווייטיד אין דער זעלביקער צייט מיט אַ נידעריק מדרגה אין זייער סס-קאַנעקטער און וואָלט אַריבערפירן דאַטן צו די מיקראָקאָנטראָללער, טראַנסמיסיע ערראָרס און קורץ סערקאַץ אויף די SPI שורות וואָלט זיין דער רעזולטאַט!
4.13 די שטיפט כעדערז SV8, SV9 און SV10 פֿאַר די TWI (= I2C) צובינד
דורך די שטיפט כעדערז SV8, SV9 און SV10 (אַראָוז (15), (16) און (14) אין פיגורע 1) דער באַניצער קענען פאַרלייגן אַ סיריאַל איך
C = ינטער-ינאַגרייטיד קרייַז) פון די מיקראָקאָנטראָללער אויף די טריינינג ברעט מיט פונדרויסנדיק I2 C פֿאַרבינדונג (I2C מאַדזשולז. אין די דאַטן בלאַט פון די AVR מיקראָקאָנטראָללער ATmega328P די I2C צובינד איז גערופן TWI (Two Wire Interface). די וויירינג פון די דריי קאַנעקטערז איז געוויזן אין פיגורע 20. 
פיגורע 20: די TWI (= I2C) ינטערפאַסע אויף די MCCAB טראַינינג באָרד
C מאַדזשולז מיט +3.3 וו אַפּערייטינג וואָלtagE זענען קאָננעקטעד צו SV8 אָדער SV9. א מדרגה אַדזשאַסטמאַנט סtage אויף SV8 און SV9 ראַדוסאַז די 5 V סיגנאַל מדרגה פון די אַוור מיקראָקאָנטראָללער ATmega328P צו די 3.3 V סיגנאַל מדרגה פון די פונדרויסנדיק מאַדזשולז. די I At SV10, די I 2 C מאַדזשולז זענען קאָננעקטעד, וואָס אַרבעט מיט די אַפּערייטינג באַנדtagE +5 V. איך 2 C צובינד באשטייט בלויז פון די צוויי ביידירעקטיאָנאַל שורות סדאַ (סיריאַל דאַטאַ) און סקל (סיריאַל זייגער). פֿאַר בעסער דיסטינגקשאַן, אין פיגורע 20, די שורות SDA און SCL זענען אנגעצייכנט מיט די סאַפיקס 5V איידער די מדרגה אַדזשאַסטמאַנט.tagE און מיט די סאַפיקס 3V3 נאָך די מדרגה אַדזשאַסטמאַנט stagE. די AVR מיקראָקאָנטראָללער ATmega328P האט אַ ייַזנוואַרג TWI (צוויי ווירע צובינד, פאַנגקשאַנאַלי יידעניקאַל צו די I 2 C צובינד) אויף זיין שפּאָן, וועמענס סיגנאַלז SDA און SCL קענען זיין קאָננעקטעד אין די מיקראָקאָנטראָללער שפּאָן צו די GPIOs A4 און A5 אויף די שטיפט כעדער SV6 ( פייַל (7) אין פיגורע 1).
אין די Arduino IDE, די דראָט ביבליאָטעק איז בארעכטיגט פֿאַר קאָנטראָל פון I 2 C מאַדזשולז, וואָס איז ינאַגרייטיד אין די באַניצער פּראָגראַם מיט # ינקלודע . 2
הינץ פֿאַר די נוצן פון די ATmega328P אַנאַלאָג / דיגיטאַל קאַנווערטער
אין די פעליקייַט באַשטעטיקן נאָך סוויטשינג אויף די אַפּערייטינג וואָלtagפון די מיקראָקאָנטראָללער מאָדולע Arduino NANO, די אַנאַלאָג / דיגיטאַל קאַנווערטער (ADC) פון די מיקראָקאָנטראָללער האט די אַנאַלאָגtage קייט וואַדק = 0 … +5 וו. אין דעם פאַל, די +5 וו אַפּערייטינג וואָלtage Vcc פון די מיקראָקאָנטראָללער מאָדולע איז אויך דער רעפֿערענץ וואָלtage VREF פון די ADC, צוגעשטעלט אַז די REF וואָקזאַל פון די קאַנעקטער SV6 (פייַל (7) אין פיגורע 1) איז אַנקאַנעקטיד. די ADC פון די ATmega328P קאַנווערץ אַן אַנאַלאָג אַרייַנשרייַב וואַלtage VADC ביי איינער פון זייַן ינפּוץ A0 … A7 אין אַ דיגיטאַל 10-ביסל ווערט Z. די נומעריקאַל ווערט Z איז אין די ביינערי רעספּ. העקסאַדעצימאַל נומער קייט ®
ז = 00 0000 00002 … 11 1111 11112 = 000 … 3FF16.
דאָס קאָראַספּאַנדז צו די דעצימאַל נומער קייט
ז = 0 … (2-1) = 0 ….
| 102310 |
| 1024 |
די ערלויבט קייט פון די אַנאַלאָג אַרייַנשרייַב וואָלtagE איז VADC = 0 V … 10 1023 REFV⋅
די אַקיעראַסי פון די אַנאַלאָג / דיגיטאַל קאַנווערזשאַן דעפּענדס דער הויפּט אויף די קוואַליטעט פון די רעפֿערענץ וואָלtage VREF, ווייַל פֿאַר די 10-ביסל נומעריקאַל ווערט ז דזשענערייטאַד דורך די אַנאַלאָג / דיגיטאַל קאַנווערטער פון די מיקראָקאָנטראָללער אַפּלייז:
ז =![]() .1024 (עקוואַציע 1)
.1024 (עקוואַציע 1)
VADC איז די אַרייַנשרייַב וואָלtage פון די אַנאַלאָג / דיגיטאַל קאַנווערטער ביי איינער פון זייַן ינפּוץ A0 ... A7 און VREF איז דער רעפֿערענץ וואָל.tagשטעלן פֿאַר די קאַנווערטער. דער רעפֿערענץ וואָלtage קענען זיין געמאסטן מיט אַ הויך ימפּידאַנס וואָלטמעטער צווישן די REF וואָקזאַל פון SV6 און די קרייַז ערד GND. דער רעזולטאַט פון די אַנאַלאָג / דיגיטאַל קאַנווערזשאַן איז אַ גאַנץ ווערט, דאָס הייסט, קיין דעצימאַל ערטער ריזאַלטינג פון די אָפּטייל פון די צוויי וואַלןtagעס VADC און VREF זענען שנייַדן אַוועק. די +5 V אַפּערייטינג וואָלtagדי פעד דורך די פּיסי דורך די וסב קאַבלע איז דזשענערייטאַד דורך די סוויטשינג מאַכט צושטעלן פון די פּיסי. אָבער, דער רעזולטאַט וואָלtage פון אַ סוויטשינג מאַכט צושטעלן יוזשאַוואַלי האט אַ ניט-נעגלאַדזשאַבאַל AC voltagדער קאָמפּאָנענט איז סופּעראַמפּאָוזד אויף עס, וואָס ראַדוסאַז די אַקיעראַסי פון די אַנאַלאָג / דיגיטאַל קאַנווערזשאַן. בעסער רעזולטאַטן קענען זיין אַטשיווד דורך ניצן די +3.3 V אַגזיליערי וואָלtage סטייבאַלייזד דורך די לינעאַר וואָלtage רעגולאַטאָר אויף די MCCAB טראַינינג באָרד ווי דער רעפֿערענץ וואָלtagE פֿאַר די אַנאַלאָג / דיגיטאַל קאַנווערטער. פֿאַר דעם צוועק, די אַנאַלאָג / דיגיטאַל קאַנווערטער פון די ATmega328P איז יניטיאַלייזד אין דעם פּראָגראַם מיט די ינסטרוקטיאָן אַנאַלאָג רעפערענסע (עקסטערנאַל); // שטעלט דעם וולtagE ביי שטיפט REF ווי רעפֿערענץ וואָלtagE לויט די געביטן רעפֿערענץ וואָלtagE און שטיפט REF פון שטיפט כעדער SV6 (פייַל (7) אין פיגורע 1) איז פארבונדן צו די שכייניש +3.3 V שפּילקע 3V3 אויף שטיפט כעדער SV6 דורך אַ דופּאָנט קאַבלע אָדער אַ דזשאַמפּער.
ביטע טאָן אַז די אַנאַלאָג וואָלtage VADC אין דער רעפֿערענץ וואָלtage VREF = 3.3 V איז נאָך קאָנווערטעד אין דיגיטאַל 10-ביסל וואַלועס אין די קייט 0 … 102310, אָבער די מעסטן קייט פון די אַנאַלאָג / דיגיטאַל קאַנווערטער איז רידוסט צו די קייט VADC = 0 … +3.297 V.
אין צוריקקומען, אַ פיינער האַכלאָטע פון די קאַנווערזשאַן רעזולטאַטן איז אַטשיווד, ווייַל די LSB (דער קלענסטער סאַלוואַבאַל ווערט) איז איצט בלויז 3.2 מוו.
![]() די אַרייַנשרייַב וואָלtage VADC פון די אַנאַלאָג/דיגיטאַל קאַנווערטער ביי זיין אַנאַלאָג ינפּוץ A0 … A7 אויף די שפּילקע כעדער SV6 מוזן שטענדיק זיין קלענערער ווי די ווערט VREF אין וואָקזאַל REF פון SV6!
די אַרייַנשרייַב וואָלtage VADC פון די אַנאַלאָג/דיגיטאַל קאַנווערטער ביי זיין אַנאַלאָג ינפּוץ A0 … A7 אויף די שפּילקע כעדער SV6 מוזן שטענדיק זיין קלענערער ווי די ווערט VREF אין וואָקזאַל REF פון SV6!
דער באַניצער מוזן ענשור אַז VADC < VREF!
![]() פֿאַר "אַקיעראַסי פון א / ד קאַנווערזשאַן" זען אויך די באַמערקונג אויף בלאַט 11.
פֿאַר "אַקיעראַסי פון א / ד קאַנווערזשאַן" זען אויך די באַמערקונג אויף בלאַט 11.
די ביבליאָטעק "MCCAB_Lib" פֿאַר די MCCAB טראַינינג באָרד
צו שטיצן די באַניצער אין קאַנטראָולינג די פילע ייַזנוואַרג קאַמפּאָונאַנץ (סוויטשיז, קנעפּלעך, לעדס, 3 × 3 געפירט מאַטריץ, בוזזער) אויף די MCCAB טראַינינג באָרד, די ביבליאָטעק "MCCAB_Lib" איז בארעכטיגט, וואָס קענען זיין דאַונלאָודיד פריי פֿון דער אינטערנעץ פּלאַץ. www.elektor.com/20440 דורך די פּערטשאַסערז פון די טריינינג ברעט.
ווייַטער ליטעראַטור אויף די נוצן פון די MCCAB טראַינינג באָרד
אין דעם בוך "מיקראָקאָנטראָללערס הענט-אויף קאָרס פֿאַר אַרדוינאָ סטאַרטערס" (ISBN 978-3-89576-5452) איר וועט ניט בלויז געפֿינען אַ דיטיילד הקדמה צו די פּראָגראַממינג פון מיקראָקאָנטראָללערס און צו די פּראָגראַממינג שפּראַך C, וואָס איז געניצט אין די Arduino IDE. פֿאַר שרייבן די מגילה, אָבער אויך אַ דיטיילד באַשרייַבונג פון די מעטהאָדס פון דער ביבליאָטעק "MCCAB_Lib" און פאַרשידן אַפּלאַקיישאַנז עקס.ampלייענען און געניטונג מגילה פֿאַר ניצן די MCCAB טראַינינג באָרד.
דאָקומענטן / רעסאָורסעס
 |
עלעקטאָר אַרדוינאָ נאַנאָ טראַינינג באָרד MCCAB [pdf] אינסטרוקציע מאַנואַל Arduino NANO Training Board MCCAB, Arduino, NANO Training Board MCCAB, Training Board MCCAB, Board MCCAB |