בונקער פּראָ
אַגילע X ראָבאָטיקס מאַנשאַפֿט
באַניצער מאַנואַל וו.1.0.0 2021.10

בונקער פּראָ טראַקט רירעוודיק ראָבאָט
דער קאַפּיטל כּולל וויכטיק זיכערקייַט אינפֿאָרמאַציע, איידער די ראָבאָט איז פּאַוערד פֿאַר די ערשטער מאָל, יעדער מענטש אָדער אָרגאַניזאַציע מוזן לייענען און פֿאַרשטיין די אינפֿאָרמאַציע איידער ניצן די מיטל. אויב איר האָט קיין פראגעס וועגן נוצן, ביטע קאָנטאַקט אונדז אין support@agilex.ai. ביטע נאָכפאָלגן און ינסטרומענט אַלע פֿאַרזאַמלונג ינסטראַקשאַנז און גיידליינז אין די קאַפּיטאַלז פון דעם מאַנואַל, וואָס איז זייער וויכטיק. ספּעציעלע אכטונג זאָל זיין באַצאָלט צו די טעקסט שייַכות צו די ווארענונג וואונדער.
![]() וויכטיק סאַפעטי אינפֿאָרמאַציע
וויכטיק סאַפעטי אינפֿאָרמאַציע
די אינפֿאָרמאַציע אין דעם מאַנואַל ינקלודז נישט די פּלאַן, ייַנמאָנטירונג און אָפּעראַציע פון אַ גאַנץ ראָבאָט אַפּלאַקיישאַן, און עס ינקלודז ניט אַלע פּעריפעראַלס וואָס קען ווירקן די זיכערקייַט פון דעם גאַנץ סיסטעם. דער פּלאַן און נוצן פון די גאַנץ סיסטעם מוזן נאָכקומען מיט די זיכערקייַט רעקווירעמענץ געגרינדעט אין די סטאַנדאַרדס און רעגיאַליישאַנז פון די מדינה ווו די ראָבאָט איז אינסטאַלירן. די ינטאַגרייטערז און סוף קאַסטאַמערז פון BUNKERPRO האָבן די פֿאַראַנטוואָרטלעכקייט צו ענשור העסקעם מיט באַטייַטיק פּראַוויזשאַנז און פּראַקטיש געזעצן און רעגיאַליישאַנז, און צו ענשור אַז עס זענען קיין הויפּט כאַזערדז אין די גאַנץ אַפּלאַקיישאַן פון די ראָבאָט. דאָס כולל אָבער איז ניט לימיטעד צו די פאלגענדע:
1. יפעקטיוונאַס און פֿאַראַנטוואָרטלעכקייט
- מאַכן אַ ריזיקירן אַסעסמאַנט פון די גאַנץ ראָבאָט סיסטעם.
- פאַרבינדן די נאָך זיכערקייַט ויסריכט פון אנדערע מאַשינערי דיפיינד דורך די ריזיקירן אַסעסמאַנט צוזאַמען.
- באַשטעטיקן אַז די פּלאַן און ייַנמאָנטירונג פון די פּעריפעראַלס פון די גאנצע ראָבאָט סיסטעם, אַרייַנגערעכנט ווייכווארג און ייַזנוואַרג סיסטעמען, זענען ריכטיק.
- דער ראָבאָט האט נישט די באַטייַטיק זיכערקייַט פאַנגקשאַנז פון אַ גאַנץ אָטאַנאַמאַס רירעוודיק ראָבאָט, אַרייַנגערעכנט אָבער ניט באגרענעצט צו אָטאַמאַטיק אַנטי-צושטויסן, אַנטי-פאַלינג, באַשעפעניש צוגאַנג ווארענונג, אאז"ו ו באַטייַטיק פּראַוויזשאַנז און אָנווענדלעך געזעצן און רעגיאַליישאַנז צו ענשור אַז די דעוועלאָפּעד ראָבאָט איז פריי פון קיין הויפּט כאַזערדז און פאַרבאָרגן דיינדזשערז אין פּראַקטיש אַפּלאַקיישאַן.
- קלייַבן אַלע די דאָקומענטן אין די טעכניש file: אַרייַנגערעכנט ריזיקירן אַסעסמאַנט און דעם מאַנואַל.
- וויסן די מעגלעך זיכערקייַט ריסקס איידער אַפּערייטינג און ניצן די ויסריכט.
2. סוויווע
- פֿאַר דער ערשטער נוצן, ביטע לייענען דעם מאַנואַל קערפאַלי צו פֿאַרשטיין די יקערדיק אָפּעראַציע אינהאַלט און אָפּעראַציע ספּעסאַפאַקיישאַנז.
- קלייַבן אַ לעפיערעך עפענען געגנט פֿאַר ווייַט קאָנטראָל, ווייַל די פאָרמיטל זיך טוט נישט האָבן קיין אָטאַמאַטיק שטערונג אַוווידאַנס סענסאָרס.
- נוצן אין אַ אַמביאַנט טעמפּעראַטור פון -20-60.
- אויב די פאָרמיטל איז נישט ינדיווידזשואַלי קאַסטאַמייז די IP שוץ מדרגה, די וואַסער-דערווייַז און שטויב-דערווייַז קאַפּאַציטעט איז IP66.
3. קוק
- פאַרזיכערן אַז יעדער ויסריכט האט גענוג אָפּצאָל.
- פאַרזיכערן אַז די פאָרמיטל האט קיין קלאָר ווי דער טאָג אַבנאָרמאַלאַטיז.
- קוק אויב די באַטאַרייע פון די ווייַט קאָנטראָל האט גענוג אָפּצאָל.
- מאַכן זיכער אַז די נויטפאַל האַלטן באַשטימען איז באפרייט ווען איר נוצן.
4. אָפּעראַציע
- פאַרזיכערן אַז די אַרומיק געגנט איז לעפיערעך עפענען בעשאַס אָפּעראַציע.
- ווייַט קאָנטראָל אין די שורה פון דערזען.
- די מאַקסימום מאַסע פון BUNKERPRO איז 120 קג. ווען אין נוצן, מאַכן זיכער אַז די פּיילאָוד איז נישט יקסיד 120 קג.
- ווען איר ינסטאַלירן אַ פונדרויסנדיק פאַרלענגערונג פֿאַר BUNKERPRO, באַשטעטיקן דעם צענטער פון מאַסע פון די פאַרלענגערונג און מאַכן זיכער אַז עס איז אין די צענטער פון ראָוטיישאַן.
- ווען די עקוויפּמענט ס וואָלtagE איז נידעריקער ווי 48 וו, ביטע באַשולדיקן עס אין צייט.
- ווען די עקוויפּמענט איז אַבנאָרמאַל, ביטע האַלטן ניצן עס מיד צו ויסמיידן צווייטיק שעדיקן.
- ווען די עקוויפּמענט איז אַבנאָרמאַל, ביטע קאָנטאַקט די באַטייַטיק טעכניש פּערסאַנעל און טאָן ניט שעפּן עס אָן דערלויבעניש.
- ביטע נוצן עס אין אַ סוויווע וואָס טרעפן די רעקווירעמענץ פון די שוץ מדרגה לויט די IP שוץ מדרגה פון די עקוויפּמענט.
- דו זאלסט נישט שטופּן די פאָרמיטל גלייַך.
- ווען טשאַרדזשינג, מאַכן זיכער אַז די אַמביאַנט טעמפּעראַטור איז העכער ווי 0 °C.
5. וישאַלט
- קעסיידער קאָנטראָלירן די שפּאַנונג פון די סוספּענדעד שפּור, און פאַרשטייַפן די שפּור יעדער 150 ~ 200 ה.
- נאָך יעדער 500 שעה פון אָפּעראַציע, קאָנטראָלירן די באָלץ און ניסלעך פון יעדער טייל פון דעם גוף. איך פאַרשטייַפן זיי מיד אויב זיי זענען פרייַ.
- אין סדר צו ענשור די סטאָרידזש קאַפּאַציטעט פון די באַטאַרייע, די באַטאַרייע זאָל זיין סטאָרד מיט אָפּצאָל, און די באַטאַרייע זאָל זיין טשאַרדזשינג קעסיידער אויב עס איז נישט געניצט פֿאַר אַ לאַנג צייַט.
הקדמה צו BUNKERPRO
BUNKERPRO איז אַ טראַקט שאַסי פאָרמיטל פֿאַר אַלע-קייַלעכיק ינדאַסטרי אַפּלאַקיישאַנז. עס האט די טשאַראַקטעריסטיקס פון פּשוט און שפּירעוודיק אָפּעראַציע, גרויס אַנטוויקלונג פּלאַץ, פּאַסיק פֿאַר אַנטוויקלונג און אַפּלאַקיישאַן אין אַ פאַרשיידנקייַט פון פעלדער, פרייַ סאַספּענשאַן סיסטעם, שווער-פליכט קלאַפּ אַבזאָרפּשאַן, שטאַרק קליימינג פיייקייט און קענען צו קריכן טרעפּ. עס קענען זיין גענוצט פֿאַר דער אַנטוויקלונג פון ספּעציעל ראָובאַץ אַזאַ ווי ראָובאַץ פֿאַר דורכקוק און עקספּלעריישאַן, ראַטעווען און EOD, ספּעציעל שיסעריי, ספּעציעל טראַנספּערטיישאַן, אאז"ו ו, צו סאָלווע ראָבאָט באַוועגונג סאַלושאַנז.
פּראָדוקט רשימה
| נאָמען | קוואַנטיטי |
| בונקער פּראָ ראָבאָט גוף | X1 |
| באַטאַרייע טשאַרדזשער (AC220V) | X1 |
| ייווייישאַן זכר צאַפּן (4-פּין) | X1 |
| FS ווייַט קאָנטראָל טראַנסמיטער (אַפּשאַנאַל) | X1 |
| וסב צו קענען קאָמוניקאַציע מאָדולע | X1 |
טעכניש ספּעסאַפאַקיישאַנז
| פּאַראַמעטער טייפּס | זאכן | וואַלועס |
| דימענשאַנז | דימענשאַנז | 1064 מם * 845 מם * 73 מם |
| שאַסי הייך | 120 מם | |
| שפּור ברייט | 150 מם | |
| לענג | 740 מם | |
| וואָג | וואָג | וועגן 180 קג |
| מאַסע | 120 קג | |
| באַטערי | טיפּ | ליטהיום באַטאַרייע |
| קאַפּאַציטעט | 60AH | |
| Voltage | 48V | |
| באַוועגונג | מאַקסימום קליימינג קאַפּאַציטעט | 30° |
| מאַקסימום גיכקייַט | 1.5 ם/ס | |
| מינימום טורנינג ראַדיוס | קענען דרייען אין פּלאַץ | |
| מאַקסימום שטערונג | 180 מם | |
| מאָטאָר פּאַראַמעטערס | 2 × 1500 וו ברושלעסס סערוואָ מאָטאָר | |
| קאָד דיסק פּאַראַמעטערס | 2500 שורות | |
| אַפּערייטינג טעמפּעראַטור | -20~60° | |
| רעדוקציע פאַרהעלטעניש | 1:7.5 | |
| קאָנטראָל | קאָנטראָל מאָדע | ווייַט קאָנטראָל |
| רק טראַנסמיטער | 2.4G / עקסטרעם דיסטאַנסע 200M | |
| קאָמוניקאַציע צובינד | קענען |
פאָדערונג פֿאַר אַנטוויקלונג
BUNKERPRO איז יקוויפּט מיט FS ווייַט קאָנטראָל אין דער פאַבריק, און ניצערס קענען קאָנטראָלירן די BUNKERPRO רירעוודיק ראָבאָט שאַסי דורך ווייַט קאָנטראָל צו פאַרענדיקן די באַוועגונג און ראָוטיישאַן אַפּעריישאַנז; BUNKERPRO איז יקוויפּט מיט CAN צובינד, און יוזערז קענען דורכפירן צווייטיק אַנטוויקלונג דורך עס.
די באַסיקס
דער אָפּטיילונג וועט געבן אַ יקערדיק הקדמה צו די BUNKERPRO רירעוודיק ראָבאָט שאַסי, אַזוי אַז ניצערס און דעוועלאָפּערס האָבן אַ יקערדיק פארשטאנד פון די BUNKERPRO שאַסי.
1 ינסטראַקשאַנז אויף עלעקטריקאַל ינטערפייסיז
די דערציען עלעקטריקאַל ינטערפייסיז זענען געוויזן אין פיגור 2.1, ווו Q1 איז די CAN און 48V מאַכט ייווייישאַן צובינד, Q2 איז די מאַכט באַשטימען, Q3 איז די טשאַרדזשינג צובינד, Q4 איז די אַנטענע, Q5 און Q6 זענען ריספּעקטיוולי די שאָפער דיבאַגינג צובינד און די הויפּט. קאָנטראָל דיבאַגינג צובינד (נישט עפענען צו די אַרויס), און Q7 איז די מאַכט אַרויסווייַזן ינטעראַקשאַן.

די דעפֿיניציע פון Q1 ס קאָמוניקאַציע און מאַכט צובינד איז געוויזן אין פיגורע 2-2.

| שפּילקע נומ. | שטיפט טיפּ | פונקציע און דעפֿיניציע | באמערקונגען |
| 1 | מאַכט | VCC | מאַכט positive, וואָלtagקייט 23-29.2וו, מאַקס. קראַנט קסנומקסאַ |
| 2 | מאַכט | GND | מאַכט נעגאַטיוו |
| 3 | קענען | CAN_H | קענען ויטאָבוס הויך |
| 4 | קענען | CAN_L | קענען ויטאָבוס נידעריק |
פיגורע 2.2 שפּילקע דעפֿיניציע פון די דערציען אַוויאַטיאָן עקסטענסיאָן צובינד
ינסטראַקשאַנז אויף ווייַט קאָנטראָל
FS ווייַט קאָנטראָל איז אַן אַפּשאַנאַל אַקסעסערי פֿאַר BUNKERPRO. קאַסטאַמערז קענען קלייַבן לויט די פאַקטיש באדערפענישן. די ווייַט קאָנטראָל קענען לייכט קאָנטראָלירן די BUNKERPRO וניווערסאַל ראָבאָט שאַסי. אין דעם פּראָדוקט, מיר נוצן די לינקס-האַנט גערגל פּלאַן. אָפּשיקן צו פיגורע 2.3 פֿאַר זייַן דעפֿיניציע און פונקציע. די פאַנגקשאַנז פון די קנעפּלעך זענען דיפיינד ווי: SWA, SWC און SWD זענען טעמפּערעראַלי פאַרקריפּלט; סווב איז די קאָנטראָל מאָדע סעלעקציע קנעפּל, דייאַלד צו די שפּיץ איז די באַפֿעל קאָנטראָל מאָדע, דייאַלד צו די מיטל איז די ווייַט קאָנטראָל מאָדע; S1 איז די גערגל קנעפּל, וואָס קאָנטראָלס די BUNKERPRO פאָרויס און צוריק; S2 קאָנטראָלס ראָוטיישאַן, בשעת POWER איז די מאַכט קנעפּל, און איר קענען קער אויף די ווייַט קאָנטראָל דורך דרינגלעך זיי אין דער זעלביקער צייט. עס זאָל זיין אנגעוויזן אַז SWA, SWB, SWC און SWD דאַרפֿן צו זיין אין די שפּיץ ווען די ווייַט קאָנטראָל איז אויסגעדרייט אויף.

פיגורע 2.3 סכעמאַטיש דיאַגראַמע פון די FS ווייַט קאָנטראָל קנעפּלעך
ינסטראַקשאַנז אויף קאָנטראָל פאדערונגען און מווומאַנץ
מיר שטעלן אַרויף אַ קאָואָרדאַנאַט רעפֿערענץ סיסטעם פֿאַר ערד רירעוודיק פאָרמיטל לויט די ISO 8855 נאָרמאַל ווי געוויזן אין פיגורע 2.4.

ווי געוויזן אין פיגורע 2.4, די פאָרמיטל גוף פון BUNKERPRO איז פּאַראַלעל צו די X אַקס פון די געגרינדעט רעפֿערענץ קאָואָרדאַנאַט סיסטעם.
אין די ווייַט קאָנטראָל מאָדע, שטופּן די ווייַט קאָנטראָל דזשויסטיק S1 פאָרויס צו מאַך אין די positive ריכטונג פון די X אַקס, און שטופּן S1 צוריק צו מאַך אין די נעגאַטיוו ריכטונג פון די X אַקס. ווען S1 איז פּושט צו די מאַקסימום ווערט, די באַוועגונג גיכקייַט אין די positive ריכטונג פון די X אַקס איז די מאַקסימום, און ווען עס איז פּושט צו די מינימום ווערט, די באַוועגונג גיכקייַט אין די נעגאַטיוו ריכטונג פון די X אַקס איז די מאַקסימום; די ווייַט קאָנטראָל דזשויסטיק ס 2 קאָנטראָלס די ראָוטיישאַן פון די פאָרמיטל גוף לינקס און רעכט. ווען S2 איז פּושט צו לינקס, די פאָרמיטל גוף ראָוטייץ פון די positive ריכטונג פון די X אַקס צו די positive ריכטונג פון די Y אַקס, און ווען S2 איז פּושט צו די רעכט, די פאָרמיטל גוף ראָוטייץ פון די positive
ריכטונג פון די X אַקס צו די נעגאַטיוו ריכטונג פון די י אַקס. ווען ס 2 איז פּושט צו די לינקס צו די מאַקסימום ווערט, די לינעאַר גיכקייַט פון קאַונטערקלאָקווייז ראָוטיישאַן איז די מאַקסימום, און ווען ס 2 איז פּושט צו די רעכט צו די מאַקסימום ווערט, די לינעאַר גיכקייַט פון קלאַקווייז ראָוטיישאַן איז די מאַקסימום. אין די קאָנטראָל באַפֿעל מאָדע, די positive ווערט פון די לינעאַר גיכקייַט מיטל מאָווינג אין די positive ריכטונג פון די X אַקס, און די נעגאַטיוו ווערט פון די לינעאַר גיכקייַט מיטל מאָווינג אין די נעגאַטיוו ריכטונג פון די X אַקס; די positive ווערט פון די ווינקלדיק גיכקייַט מיטל אַז די פאָרמיטל גוף באוועגט פון די positive ריכטונג פון די X אַקס צו די positive ריכטונג פון די Y אַקס, און די נעגאַטיוו ווערט פון די ווינקלדיק גיכקייַט מיטל אַז די פאָרמיטל גוף באוועגט פון די positive ריכטונג פון די פאָרמיטל גוף. X אַקס צו די נעגאַטיוו ריכטונג פון די Y אַקס.
ניצן און אַנטוויקלונג
דער אָפּטיילונג דער הויפּט ינטראַדוסיז די יקערדיק אָפּעראַציע און נוצן פון די BUNKERPRO פּלאַטפאָרמע, און ווי צו דורכפירן די צווייטיק אַנטוויקלונג פון די פאָרמיטל גוף דורך די פונדרויסנדיק CAN צובינד און די CAN ויטאָבוס פּראָטאָקאָל.
נוצן און אָפּעראַציע
טשעק
- קאָנטראָלירן די צושטאַנד פון די פאָרמיטל גוף. קוק אויב די פאָרמיטל גוף האט קלאָר ווי דער טאָג אַבנאָרמאַלאַטיז; אויב אַזוי, ביטע קאָנטאַקט נאָך-סאַלעס שטיצן;
- ווען ניצן פֿאַר די ערשטער מאָל, באַשטעטיקן צי Q2 (מאַכט באַשטימען) אין די דערציען עלעקטריקאַל טאַפליע איז געדריקט; אויב עס איז נישט געדריקט, ביטע דריקן עס און מעלדונג עס, עס איז אין די פריי שטאַט.
סטאַרטאַפּ
- דרוק די מאַכט באַשטימען (ק 2 אין די עלעקטריקאַל טאַפליע); אונטער נאָרמאַל צושטאנדן, די ליכט פון די מאַכט באַשטימען וועט ליכט אַרויף, און די וואָלטמעטער וועט ווייַזן די באַטאַרייע וואָלtage נאָרמאַלי;
- קוק די באַטאַרייע וואָלtagE. אויב די וואָלtage איז גרעסער ווי 48 וו, עס מיטל די באַטאַרייע וואָלtagE איז נאָרמאַל. אויב די וואָלtagE איז נידעריקער ווי 48 וו, ביטע אָפּצאָל; ווען דער וולtagE איז נידעריקער ווי 46 וו, BUNKERPRO קען נישט רירן נאָרמאַלי.
שאַטדאַון
- דרוק די מאַכט באַשטימען צו שנייַדן אַוועק די מאַכט;
יקערדיק אַפּערייטינג פּראָוסידזשערז פון ווייַט קאָנטראָל:
- נאָך סטאַרטינג די BUNKERPRO ראָבאָט שאַסי נאָרמאַלי, אָנהייב די ווייַט קאָנטראָל און אויסקלייַבן די ווייַט קאָנטראָל מאָדע צו קאָנטראָלירן די באַוועגונג פון די BUNKER PRO פּלאַטפאָרמע דורך די ווייַט קאָנטראָל.
טשאַרדזשינג
BUNKERPRO איז יקוויפּט מיט אַ נאָרמאַל טשאַרדזשער דורך פעליקייַט, וואָס קענען טרעפן די טשאַרדזשינג באדערפענישן פון קאַסטאַמערז. די ספּעציפיש אַפּערייטינג פּראָוסידזשערז פון טשאַרדזשינג זענען ווי גייט:
- מאַכן זיכער אַז די BUNKERPRO שאַסי איז אין אַ שאַטדאַון שטאַט. איידער טשאַרדזשינג, ביטע מאַכן זיכער אַז Q2 (מאַכט באַשטימען) אין די דערציען עלעקטריקאַל קאַנסאָול איז אויסגעדרייט אַוועק; אַרייַנלייגן די צאַפּן פון די טשאַרדזשער אין די
- Q3 טשאַרדזשינג צובינד אין די דערציען עלעקטריקאַל קאָנטראָל טאַפליע;
- פאַרבינדן די טשאַרדזשער צו די מאַכט צושטעלן און קער אויף די טשאַרדזשער באַשטימען צו אַרייַן די טשאַרדזשינג שטאַט.
- ווען טשאַרדזשינג דורך פעליקייַט, עס איז קיין גראדן ליכט אויף די שאַסי. צי עס איז טשאַרדזשינג אָדער נישט דעפּענדס אויף די סטאַטוס גראדן פון די טשאַרדזשער.
אַנטוויקלונג
BUNKERPRO גיט אַ CAN צובינד פֿאַר דער אַנטוויקלונג פון דער באַניצער, און דער באַניצער קענען קאָנטראָלירן די פאָרמיטל גוף דורך דעם צובינד.
די CAN קאָמוניקאַציע סטאַנדאַרט אין BUNKERPRO אַדאַפּץ די CAN2.0B נאָרמאַל; די קאָמוניקאַציע באַוד קורס איז 500K, און דער אָנזאָג פֿאָרמאַט אַדאַפּץ די MOTOROLA פֿאָרמאַט. די לינעאַר גיכקייַט פון די באַוועגונג און די ווינקלדיק גיכקייַט פון די ראָוטיישאַן פון די שאַסי קענען זיין קאַנטראָולד דורך די פונדרויסנדיק קענען ויטאָבוס צובינד; BUNKERPRO וועט באַמערקונגען די קראַנט באַוועגונג סטאַטוס אינפֿאָרמאַציע און די סטאַטוס אינפֿאָרמאַציע פון די BUNKERPRO שאַסי אין פאַקטיש צייט.
דער פּראָטאָקאָל כולל סיסטעם סטאַטוס באַמערקונגען ראַם, באַוועגונג קאָנטראָל באַמערקונגען ראַם און קאָנטראָל ראַם.
דער אינהאַלט פון דעם פּראָטאָקאָל איז ווי גייט:
די סיסטעם סטאַטוס באַמערקונגען באַפֿעל כולל די קראַנט פאָרמיטל גוף סטאַטוס באַמערקונגען, קאָנטראָל מאָדע סטאַטוס באַמערקונגען, באַטאַרייע וואָלtagE באַמערקונגען, און שולד באַמערקונגען. דער אינהאַלט פון דעם פּראָטאָקאָל איז געוויזן אין טאַבלע 3.1.
טיש 3.1 באַמערקונגען ראַם פון BUNKERPRO שאַסי סיסטעם סטאַטוס
| באַפֿעלן נאָמען | סיסטעם סטאַטוס באַמערקונגען באַפֿעל | |||
| שיקט נאָדע | באקומען נאָדע | ID | ציקל איך ms) | באַקומען צייט-אויס (ms) |
| קעריינג-דורך-דראָט שאַסי | באַשלוס-מאכן קאָנטראָל אַפּאַראַט | 0x221 | 200ms | קיינער |
| דאַטע לענג | 0x08 | |||
| שטעלע | פֿונקציע | דאַטע טיפּ | באַשרייַבונג | |
| בייט [0] | קראַנט סטאַטוס פון פאָרמיטל גוף | אַנסיינד ינט8 | 0x00 סיסטעם אין נאָרמאַל צושטאַנד אָקס01 עמערגענסי האַלטן מאָדע 0x02 סיסטעם ויסנעם | |
| בייטע פ 1] | מאָדע קאָנטראָל | אַנסיינד ינט8 | אָקס00 סטאַנדביי מאָדע אָקס01 קענען באַפֿעלן קאָנטראָל מאָדע 0x03 רימאָוט קאָנטראָל מאָדע | |
| בייט [2] בייט [3] | די באַטאַרייע וואָלtage איז 8 ביטן העכער v די באַטעריאָלtage איז אַכט ביטן נידעריקער | נישט אונטערגעשריבן ינטקסנומקס | פאַקטיש וואָלtagעקס 10 (מיט אַ אַקיעראַסי פון 0.1 וו) | |
| זיין [4] בייט [5] | רעזערווירט דורכפאַל אינפֿאָרמאַציע | אַנסיינד ינט8 | 0x0 אָפּשיקן צו [דיסקריפּשאַן פון שולד אינפֿאָרמאַציע) | |
| בייט [6] | רעזערווירט | – | אָקס 00 | |
| בייט [7] | ציילן טשעק (ציילן) | אַנסיינד ינט8 | 0-255 ציקל ציילן: יעדער מאָל אַ לימעד איז געשיקט, דער ציילן וועט פאַרגרעסערן אַמאָל |
טיש 3.2 באַשרייַבונג פון שולד אינפֿאָרמאַציע
| באַשרייַבונג פון שולד אינפֿאָרמאַציע | ||
| ביטע | ביסל | טייַטש |
| ביסל [0] | באַטערי אַנדערוואָלtagE שולד | |
| ביסל [1] | באַטערי אַנדערוואָלtagE ווארענונג | |
| ביסל [2] | שוץ פון ווייַט קאָנטראָל דיסקאַנעקשאַן (0: נאָרמאַל, 1: ווייַט קאָנטראָל דיסקאַנעקשאַן) | |
| ביסל [3] | נומער 1 מאָטאָר קאָמוניקאַציע דורכפאַל (0: ניין דורכפאַל 1: דורכפאַל) | |
| ביסל [4] | נומער 2 מאָטאָר קאָמוניקאַציע דורכפאַל (0: ניין דורכפאַל 1: דורכפאַל) | |
| ביסל [5] | רעזערווירט, פעליקייַט 0 | |
| ביסל [6] | רעזערווירט, פעליקייַט 0 | |
| ביסל [7] | רעזערווירט, פעליקייַט 0 |
דער באַפֿעל פון באַוועגונג קאָנטראָל באַמערקונגען ראַם כולל די באַמערקונגען פון קראַנט לינעאַר גיכקייַט און ווינקלדיק גיכקייַט פון מאָווינג פאָרמיטל גוף. דער ספּעציפיש פּראָטאָקאָל אינהאַלט איז געוויזן אין טאַבלע 3.3.
טיש 3.3 באַוועגונג קאָנטראָל באַמערקונגען ראַם
| באַפֿעלן נאָמען | באַוועגונג קאָנטראָל באַמערקונגען באַפֿעל | |||
| שיקט נאָדע | באקומען נאָדע | ID | ציקל (מס) | באַקומען טיימאַוט (מס) |
| פירן-בייווירע שאַסי | באַשלוס-מאכן קאָנטראָל אַפּאַראַט | 0x221 | 20ms | קיינער |
| דאַטאַ לענג | 0x08 | |||
| שטעלע | פֿונקציע | דאַטע טיפּ | באַשרייַבונג | |
| בייט [0] בייט [1] | די באַוועגונג די גיכקייַט איז 8 ביץ העכער די איבערבליק די גיכקייַט איז 8 ביץ נידעריקער | געחתמעט ינט16 | פאַקטיש גיכקייַט × 1000 (מיט אַ אַקיעראַסי פון 0.001 ם/ס) | |
| בייט [2] בייט [3] | די ראָוטיישאַן גיכקייַט איז 8 ביץ העכער די ראָוטיישאַן גיכקייַט איז 8 ביטן נידעריקער | געחתמעט ינט16 | פאַקטיש גיכקייַט × 1000 (מיט אַ אַקיעראַסי פון 0.001 ראד/ס) | |
| בייט [4] | רעזערווירט | – | 0x00 | |
| בייט [5] | רעזערווירט | – | 0x00 | |
| בייט [6] | רעזערווירט | – | 0x00 | |
| בייט [7] | רעזערווירט | – | 0x00 |
די קאָנטראָל ראַם כולל לינעאַר גיכקייַט קאָנטראָל עפן, ווינקלדיק גיכקייַט קאָנטראָל עפן און טשעק סאַכאַקל. דער ספּעציפיש אינהאַלט פון דעם פּראָטאָקאָל איז געוויזן אין טאַבלע 3.4.
טיש 3.4 באַוועגונג קאָנטראָל ראַם
| באַפֿעלן נאָמען | קאָנטראָל מאָדע | |||
| שיקט נאָדע | באקומען נאָדע | ID | ציקל (רנס) | באַקומען צייט-אויס (ms) |
| מאכן א באשלוס קאָנטראָל אַפּאַראַט | שאַסי נאָדע | אָקס 111 | 20ms | קיינער |
| דאַטע לענג | 0x08 | |||
| שטעלע | פֿונקציע | דאַטע טיפּ | ||
| בייט [0] בייט [1) | די לינעאַר גיכקייַט איז אַכט ביטן העכער די לינעאַר גיכקייַט איז אַכט ביטן נידעריקער | געחתמעט ינט16 | מאָווינג גיכקייַט פון פאָרמיטל גוף. אַפּאַראַט: מרינס, קייט [-1700,1700] | |
| בייט [2] בייט [3] | די ווינקלדיק גיכקייַט איז אַכט ביטן העכער די ווינקלדיק גיכקייַט איז אַכט ביטן נידעריקער | געחתמעט ינט16 | ווינקלדיק גיכקייַט פון פאָרמיטל גוף ראָוטיישאַן, אַפּאַראַט: 0.001 ראַדלס. קייט [- 3140,3140) | |
| בייט [4] | רעזערווירט | — | אָקס 00 | |
| בייט [5] | רעזערווירט | — | אָקס 00 | |
| בייט [6] | רעזערווירט | — | אָקס 00 | |
| בייט [7] | רעזערווירט | — | אָקס 00 |
די מאָדע באַשטעטיקן ראַם איז געניצט צו שטעלן די קאָנטראָל צובינד פון די וואָקזאַל. דער ספּעציפיש פּראָטאָקאָל אינהאַלט איז געוויזן אין טאַבלע 3.5
טיש 3.5 קאָנטראָל מאָדע באַשטעטיקן ראַם
| באַפֿעלן נאָמען | קאָנטראָל מאָדע באַשטעטיקן באַפֿעל | |||
| שיקט נאָדע | באקומען נאָדע | ID | ציקל (מס) | באַקומען צייט-אויס (ms) |
| באַשלוס-מאכן קאָנטראָל אַפּאַראַט | שאַסי נאָדע | 0x421 | 20ms | 500ms |
| דאַטע לענג | אָקס 01 | |||
| שטעלע | פֿונקציע | דאַטע טיפּ | באַשרייַבונג | |
| בייט (01 | קענען קאָנטראָלירן געבן | אַנסיינד ינט8 | אָקס00 סטאַנדביי מאָדע 0קס01 קענען באַפֿעלן מאָדע געבן |
באַמערקונג [1] באַשרייַבונג פון קאָנטראָל מאָדע
ווען די ווייַט קאָנטראָל פון BUNKERPRO איז נישט פּאַוערד אויף, די קאָנטראָל מאָדע איז סטאַנדביי מאָדע דורך פעליקייַט, און איר דאַרפֿן צו באַשטימען עס צו באַפֿעלן מאָדע צו שיקן באַוועגונג קאָנטראָל באַפֿעל. אויב די ווייַט קאָנטראָל איז אויסגעדרייט אויף, די ווייַט קאָנטראָל האט די העכסטן אויטאָריטעט און קענען באַשיצן די קאָנטראָל פון קאַמאַנדז. ווען די ווייַט קאָנטראָל איז סוויטשט צו די באַפֿעל מאָדע, עס נאָך דאַרף צו שיקן די קאָנטראָל מאָדע באַשטעטיקן באַפֿעל איידער ריספּאַנד צו די גיכקייַט באַפֿעל.
די סטאַטוס באַשטעטיקן ראַם איז געניצט צו ויסמעקן סיסטעם ערראָרס. דער ספּעציפיש פּראָטאָקאָל אינהאַלט איז געוויזן אין טאַבלע 3.6.
טיש 3.6 סטאַטוס באַשטעטיקן ראַם
| באַפֿעלן נאָמען | סטאַטוס באַשטעטיקן באַפֿעל | |||
| שיקט נאָדע | באקומען נאָדע | ID | ציקל (מס) | באַקומען צייט-אויס |
| באַשלוס-מאכן קאָנטראָל אַפּאַראַט | שאַסי נאָדע | 0x441 | קיינער | קיינער |
| דאַטע לענג | 0x01 | |||
| שטעלע | פֿונקציע | דאַטע טיפּ | באַשרייַבונג | |
| בייט [0] | טעות קלירינג באַפֿעלן | אַנסיינד ינט8 | 0x00 ויסמעקן אַלע ערראָרס 0x01 קלאָר מאָטאָר 1 ס טעות 0x02 קלאָר מאָטאָר 2 ס טעות |
באַמערקונג 3: שample data; די פאלגענדע דאַטן זענען בלויז פֿאַר טעסטינג צוועקן
1. די פאָרמיטל אַדוואַנסיז מיט אַ גיכקייַט פון 0.15/S
| בייט [0] | בייט [1] | בייט [2] | בייט [3] | בייט [4] | בייט [5] | בייט [6] | בייט [7] |
| 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 |
2. די פאָרמיטל ראָוטייץ בייַ 0.2RAD/S
| בייט [0] | בייט [1] | בייט [2] | בייט [3] | בייט [4] | בייט [5] | בייט [6] | בייט [7] |
| 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 |
אין אַדישאַן צו די שאַסי סטאַטוס אינפֿאָרמאַציע וועט זיין פעד צוריק, די שאַסי באַמערקונגען אינפֿאָרמאַציע אויך כולל מאָטאָר דאַטן און סענסער דאַטן.
טאַבלע 3.7 מאָטאָר ספּיד קראַנט שטעלע אינפֿאָרמאַציע באַמערקונגען
| באַפֿעלן נאָמען | מאָטאָר פאָר הויך ספּיד אינפֿאָרמאַציע באַמערקונגען ראַם | |||
| שיקט נאָדע | באקומען נאָדע | ID | באַקומען צייט - אויס (מס) | |
| קעריינג-דורך-דראָט שאַסי | באַשלוס-מאכן קאָנטראָל אַפּאַראַט | 0x251-0x254 | 20ms | קיינער |
| דאַטאַ לענג | אָקס 08 | |||
| שטעלע | פֿונקציע | – | באַשרייַבונג | |
| בייט [0] בייט [1] | די מאָטאָר גיכקייַט איז 8 ביץ העכער די מאָטאָר גיכקייַט איז 8 ביץ נידעריקער | געחתמעט ינט16 | קראַנט מאָטאָר גיכקייַט אַפּאַראַט רפּם | |
| בייט [2] | רעזערווירט | – | אָקס 00 | |
| בייט [3] | די פאָר טעמפּעראַטור איז 8 ביץ נידעריקער | – | אַפּאַראַט קסנומקס ה | |
| בייט [4] | רעזערווירט | – | אָקס 00 | |
| בייט [5] | דרייוו סטאַטוס | – | זען טאַבלע 3.9 פֿאַר פרטים | |
| בייט [6] | רעזערווירט | – | אָקס 00 | |
| בייט [7] | רעזערווירט | – | 0x00 |
טיש 3.8 מאָטאָר טעמפּעראַטור, חלקtage און סטאַטוס אינפֿאָרמאַציע באַמערקונגען
| באַפֿעלן נאָמען | מאָטאָר דרייוו נידעריק ספּיד אינפֿאָרמאַציע באַמערקונגען ראַם | ||
| שיקט איך באַקומען נאָדע נאָדע | ID | ציקל :ms) | באַקומען צייט-אויס (ms) |
| פירן-דורך-דיסיאָן- דראָט מאכן קאָנטראָל | שאַסי אַפּאַראַט 0x261-0x264 | קיינער | קיינער |
| דאַטן 0x08 לענג | |||
| שטעלע איך פֿונקציע | באַשרייַבונג | ||
| בייט [0] בייט [1] | רעזערווירט רעזערווירט | Ox00 0x00 | |
| בייט [2] בייט [3] | די פאָר טעמפּעראַטור איז 8 ביטן העכער די פאָר טעמפּעראַטור איז 8 ביץ נידעריקער | געחתמעט ינט16 | אַפּאַראַט 1℃ |
| בייט [4] | רעזערווירט | אָקס 00 | |
| בייט [5] | דרייוו סטאַטוס | אַנסיינד ינט8 | זען טאַבלע 3.9 פֿאַר פרטים |
| בייט [6] | רעזערווירט | – | אָקס 00 |
| בייט [7] | רעזערווירט | – | 0x00 |
טיש 3.9 דרייוו סטאַטוס
| ביטע | ביסל | באַשרייַבונג |
| בייט [5] | ביסל [0] | צי די מאַכט צושטעלן וואָלtage איז צו נידעריק (0: נאָרמאַל 1: צו נידעריק) |
| ביסל [1] | צי דער מאָטאָר איז אָוווערכיטיד (0: נאָרמאַל 1: אָוווערכיטיד) | |
| ביסל [2] | רעזערווירט | |
| ביסל [3] | רעזערווירט | |
| ביסל [4] | רעזערווירט | |
| ביסל [5] | רעזערווירט | |
| ביסל [6] | רעזערווירט | |
| ביסל [7] | רעזערווירט |
טיש 3.10 אָדאָמעטער באַמערקונגען ראַם
| באַפֿעלן נאָמען | אָדאָמעטער אינפֿאָרמאַציע באַמערקונגען ראַם | |||
| שיקט נאָדע | באקומען נאָדע | ID | ציקל (מס) | באַקומען טיימאַוט (מס) |
| פירן-דורך- שאַסי | באַשלוס-מאכן קאָנטראָל אַפּאַראַט | 0x311 | 20ms | קיינער |
| דאַטע לענג | אָקס 08 | |||
| שטעלע | פֿונקציע | דאַטע טיפּ | באַשרייַבונג | |
| בייט [0] בייט [1] בייט [2] בייט [3] | העכסטן ביסל פון לינקס ראָד אָודאַמאַטער צווייט-העכסטן ביסל פון לינקס ראָד אָודאַמאַטער צווייט-לאָואַסט ביסל פון לינקס ראָד אָודאַמאַטער לאָואַסט ביסל פון לינקס ראָד אָודאַמאַטער | געחתמעט ינט32 | שאַסי לינקס ראָד אָודאַמאַטער באַמערקונגען אַפּאַראַט: מם | |
| בייט [4] בייט [5] בייט [6] בייט 17) | די העכסטן ווערט פון רעכט ראָד אָודאַמאַטער צווייט-העכסטן ביסל פון רעכט ראָד אָודאַמאַטער צווייט-לאָואַסט ביסל פון רעכט ראָד אָודאַמאַטער לאָואַסט ביסל פון רעכט ראָד אָודאַמאַטער | געחתמעט ינט32 אַפּאַראַט: מם | שאַסי רעכט ראָד אָודאַמאַטער באַמערקונגען |
טיש 3.11 רימאָוט קאָנטראָל אינפֿאָרמאַציע באַמערקונגען
| באַפֿעלן נאָמען | רימאָוט קאָנטראָל אינפֿאָרמאַציע | |||
| שיקט נאָדע | באקומען נאָדע | ID | ציקל (מס / | באַקומען צייט-אויס (ms) |
| פירן-בייווירע שאַסי | באַשלוס-מאכן קאָנטראָל אַפּאַראַט | 0x241 | 20ms | קיינער |
| דאַטאַ לענג | 0x08 | |||
| שטעלע | פֿונקציע | דאַטע טיפּ | באַשרייַבונג | |
| בייט [0] | ווייַט קאָנטראָל סוו באַמערקונגען | אַנסיינד ינט8 | ביסל[0-1]: SWA 2-Up 3-Down ביסל[2-3]: סווב: 2-אַרויף 1-מיטן 3-אַראָפּ bit14-51: SWC: 2-אַרויף 1-מיטן 3-אַראָפּ ביסל [6-71: SWD: 2-אַרויף 3-אַראָפּ | |
| הי1ע [1] | רעכטע הייבער לינקס א | געחתמעט ינט8 | קייט: (-100.100) | |
| בייט [2] | רעכט הייבער לינקס און רעכט | געחתמעט ינט8 | קייט: [-100.100] | |
| בייט [3] | לינקס הייבער אַרויף און אַראָפּ | געחתמעט ינט8 | קייט: (-100.100] | |
| בייט [4] | לינקס הייבער לינקס און רעכט | געחתמעט ינט8 | קייט: (-100.100] | |
| בייט יסי | לינקס קנופּ VRA | געחתמעט ינט8 | קייט: (-100.100) | |
| בייט [6] | רעזערווירט | — | 0x00 | |
| בייט (71 | ציילן טשעק | אַנסיינד ינט8 | 0-255 ציקל ציילן |
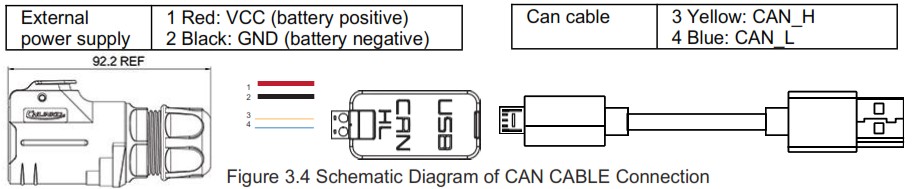
קענען קאַבלע קשר
BUNKERPRO איז שיפּט מיט אַ ייווייישאַן צאַפּן זכר קאַנעקטער ווי געוויזן אין פיגורע 3.2. די דעפֿיניציע פון די קאַבלע: געל איז CANH, בלוי איז CANL, רויט איז מאַכט positive, און שוואַרץ איז מאַכט נעגאַטיוו.
באַמערקונג: אין די קראַנט BUNKERPRO ווערסיע, די פונדרויסנדיק פאַרלענגערונג צובינד איז אָפן בלויז צו די דערציען צובינד. אין דעם ווערסיע, די מאַכט צושטעלן קענען צושטעלן אַ מאַקסימום קראַנט פון 10 אַ.

רעאַליזאַטיאָן פון קענען באַפֿעלן קאָנטראָל
אָנהייב די BUNKERPRO רירעוודיק ראָבאָט שאַסי נאָרמאַלי, קער אויף די FS ווייַט קאָנטראָל, און דאַן באַשטימען די קאָנטראָל מאָדע צו באַפֿעלן קאָנטראָל, דאָס איז, קער די SWB מאָדע סעלעקציע פון די FS ווייַט קאָנטראָל צו די שפּיץ. אין דער צייט, די BUNKERPRO שאַסי וועט אָננעמען די באַפֿעל פון די CAN צובינד, און דער באַלעבאָס קענען אויך פונאַנדערקלייַבן די קראַנט סטאַטוס פון די שאַסי דורך די פאַקטיש-צייט דאַטן פעד דורך די CAN ויטאָבוס אין דער זעלביקער צייט. אָפּשיקן צו CAN קאָמוניקאַציע פּראָטאָקאָל פֿאַר ספּעציפיש פּראָטאָקאָל אינהאַלט.
פירמוואַרע אַפּגרייד (נישט אָפֿן נאָך)
אין סדר צו פאַסילאַטייט ניצערס צו אַפּגרייד די פירמוואַרע ווערסיע געניצט דורך BUNKERPRO און ברענגען קאַסטאַמערז אַ מער פולשטענדיק דערפאַרונג, BUNKERPRO איז צוגעשטעלט מיט אַ ייַזנוואַרג צובינד פֿאַר פירמוואַרע אַפּגרייד און קאָראַספּאַנדינג קליענט ווייכווארג. דער קליענט צובינד איז געוויזן אין פיגורע 3.3.
אַפּגרייד צוגרייטונג
- סיריאַל קאַבלע X 1
- וסב צו סיריאַל פּאָרט X 1
- BUNKERPRO שאַסי X 1
- קאָמפּיוטער (ווינדאָוז אָפּערייטינג סיסטעם) X 1
פירמוואַרע אַפּגרייד ווייכווארג - https://github.com/agilexrobotics/agilex_firmware
- פאַרזיכערן אַז די מאַכט צושטעלן פון די ראָבאָט שאַסי איז דיסקאַנעקטיד איידער קאַנעקטינג;
- ניצן די סיריאַל קאַבלע צו פאַרבינדן צו די BUNKERPRO שאַסי אַפּגרייד סיריאַל פּאָרט (ריקווייערז דיסאַססעמבלי פון די דערציען עלעקטריקאַל ברעט); פאַרבינדן די סיריאַל קאַבלע צו די קאָמפּיוטער;
- עפֿענען דעם קליענט ווייכווארג;
- אויסקלייַבן די פּאָרט נומער;
- מאַכט אויף די UNKERPRO שאַסי און גיט "אָנהייב קאַנעקשאַן" גלייך (די שאַסי וועט וואַרטן 3 ס איידער מאַכט אויף; אויב די צייט יקסידז 6 ס, עס וועט אַרייַן די אַפּלאַקיישאַן); אויב די פֿאַרבינדונג איז געראָטן, די טעקסט קעסטל וועט פּינטלעך "קאָננעקטעד הצלחה";
- לאָדן בין file;
- דריקט דעם אַפּגרייד קנעפּל, און וואַרטן פֿאַר די פּינטלעך קאַמפּלישאַן פון אַפּגרייד;
- דיסקאַנעקט די סיריאַל קאַבלע, מאַכט אַוועק די שאַסי און מאַכט אויף ווידער.

פיגורע 3.3 קליענט צובינד פון פירמוואַרע אַפּגרייד
BUNKERPRO ROS פּעקל ניצן עקסample
ROS פּראָווידעס עטלעכע נאָרמאַל אָפּערייטינג סיסטעם באַדינונגס, אַזאַ ווי ייַזנוואַרג אַבסטראַקשאַן, נידעריק-מדרגה ויסריכט קאָנטראָל, ימפּלאַמענטיישאַן פון פּראָסט פאַנגקשאַנז, ינטער-פּראָסעס אָנזאָג און דאַטן פּאַקאַט פאַרוואַלטונג. ROS איז באזירט אויף אַ גראַפיק אַרקאַטעקטשער, אַזוי אַז פּראַסעסאַז פון פאַרשידענע נאָודז קענען באַקומען, מעלדונג און צונויפגיסן פאַרשידן אינפֿאָרמאַציע (אַזאַ ווי סענסינג, קאָנטראָל, סטאַטוס, פּלאַנירונג, אאז"ו ו). דערווייַל, ROS שטיצט UBUNTU.
אַנטוויקלונג צוגרייטונג
ייַזנוואַרג צוגרייטונג
- קענען ליכט קענען קאָמוניקאַציע מאָדולע X1
- טראַכטן פּאַד E470 העפט X1 AGILEX BUNKERPRO רירעוודיק ראָבאָט שאַסי X1
- AGILEX BUNKERPRO שטיצט ווייַט קאָנטראָל FS-i6s X1
- AGILEX BUNKERPRO שפּיץ ייווייישאַן כאָלעל X1
ניצן עקסampלאַ סוויווע באַשרייַבונג
- Ubuntu 16.04 LTS (דאָס איז אַ פּראָבע ווערסיע טעסטעד אויף Ubuntu 18.04 LTS)
- ROS Kinetic (סודערסיווע ווערסיעס זענען אויך טעסטעד)
- גיט
ייַזנוואַרג קשר און צוגרייטונג
- פירן אויס די CAN קאַבלע פון די BUNKERPRO שפּיץ ייווייישאַן צאַפּן אָדער די עק צאַפּן, און פאַרבינדן CAN_H און CAN_L אין די CAN קאַבלע צו די CAN_TO_USB אַדאַפּטער ריספּעקטיוולי;
- קער אויף די קנופּ באַשטימען אויף די BUNKERPRO רירעוודיק ראָבאָט שאַסי, און קאָנטראָלירן צי די נויטפאַל האַלטן סוויטשיז אויף ביידע זייטן זענען פריי;
- פאַרבינדן די CAN_TO_USB צו די וסב צובינד פון די העפט. די קשר דיאַגראַמע איז געוויזן אין פיגורע 3.4.
ROS ינסטאַלירונג און סוויווע באַשטעטיקן
פֿאַר ייַנמאָנטירונג דעטאַילס, ביטע אָפּשיקן צו http://wiki.ros.org/kinetic/Installa-tion/Ubuntu
פּרובירן קאַנאַבאַל ייַזנוואַרג און קענען קאָמוניקאַציע
שטעלן קענען-צו-וסב אַדאַפּטער
- געבן gs_usb קערן מאָדולע $ sudo modprobe gs_usb
- באַשטעטיק 500K באַוד קורס און געבן קאַנ-צו-וסב אַדאַפּטער $ סודאָ יפּ לינק שטעלן קאַנ0 אַרויף טיפּ קענען ביטראַטע 500000
- אויב קיין טעות איז פארגעקומען אין די פריערדיקע סטעפּס, איר זאָל קענען צו נוצן דעם באַפֿעל צו view די קענען ויסריכט מיד $ ifconfig -a
- ינסטאַלירן און נוצן can-utils צו פּרובירן ייַזנוואַרג $ sudo apt install can-utils
- אויב די קאַנ-צו-וסב איז קאָננעקטעד צו די BUNKERPRO ראָבאָט דעם מאָל, און די פאָרמיטל איז אויסגעדרייט אויף, נוצן די פאלגענדע קאַמאַנדז צו מאָניטאָר די דאַטן פון די BUNKERPRO שאַסי $ candump can0
- רעפערענץ מקורים:
[1]https://github.com/agilexrobotics/agx_sdk
[2]https://wiki.rdu.im/_pages/Notes/Embed-dedSystem/Linux/can-bus-in-linux.html - אראפקאפיע ראָס אָפענגיק פּעקל
AGILEX BUNKERPRO ROS פּאַקקאַגע אראפקאפיע און צונויפנעמען
$ sudo apt install ros-$ROS_DISTRO-teleop-twist-key-board
$ sudo apt install libasio-dev
• קלאָון און צונויפנעמען בונקער_ראָס מקור קאָד
$ cd ~/catkin_ws/src
$ גיט קלאָון https://github.com/agilexrobotics/ugv_sdk.git
$ גיט קלאָון https://github.com/agilexrobotics/bunker_ros.git
$ סי ..
$ קאַטקין_מאַקע
רעפערענץ מקור:
https://github.com/agilexrobotics/bunker_ros
אָנהייב די ROS נאָודז
- אָנהייב די באַזע נאָדע
$ ראָסלאַונטש bunker_bringup bunker_minimal.launch - אָנהייב די קלאַוויאַטור ווייַט אָפּעראַציע נאָדע
$ ראָסלאָנטש bunker_bringup bunker_teleop_keyboard.launch
מאסנאמען
דער אָפּטיילונג כּולל עטלעכע פּריקאָשאַנז פֿאַר ניצן און דעוועלאָפּינג BUNKERPRO.
באַטערי פּריקאָשאַנז
- ווען BUNKERPRO פארלאזן די פאַבריק, די באַטאַרייע איז נישט גאָר באפוילן. די ספּעציפיש באַטאַרייע מאַכט קענען זיין געוויזן דורך די וואַלtagע אַרויסווייַזן מעטער אויף די BUNKERPRO שאַסי דערציען אָדער לייענען דורך די CAN ויטאָבוס קאָמוניקאַציע צובינד;
- ביטע טאָן ניט באַשולדיקן די באַטאַרייע נאָך די מאַכט איז ויסגעמאַטערט. ביטע באַשולדיקן עס אין צייט ווען די נידעריק וואָלtagE ביי די BUNKERPRO דערציען איז נידעריקער ווי 48 וו; סטאַטיק סטאָרידזש טנאָים: דער בעסטער ימפּעראַטורע פֿאַר באַטאַרייע סטאָרידזש איז -10 ° C ~ 45 ° C; אין פאַל פון סטאָרידזש פֿאַר קיין נוצן, די באַטאַרייע מוזן זיין ריטשאַרדזשד און דיסטשאַרדזשד אַמאָל יעדער 1 חודש, און דעמאָלט סטאָרד אין פולtagE שטאַט. ביטע טאָן ניט שטעלן די באַטאַרייע אין פייַער אָדער היץ אַרויף די באַטאַרייע, און ביטע טאָן ניט קראָם די באַטאַרייע אין הויך-טעמפּעראַטור סוויווע;
- טשאַרדזשינג: די באַטאַרייע מוזן זיין באפוילן מיט אַ דעדאַקייטאַד ליטהיום באַטאַרייע טשאַרדזשער. דו זאלסט נישט באַשולדיקן די באַטאַרייע אונטער 0 ° C, און טאָן ניט נוצן באַטעריז, מאַכט סאַפּלייז און טשאַרדזשערז וואָס זענען נישט נאָרמאַל.
פּריקאָשאַנז פֿאַר אַפּעריישאַנאַל סוויווע
- די אַפּערייטינג טעמפּעראַטור פון BUNKERPRO איז 20 ℃ ~ 60 ℃; ביטע טאָן ניט נוצן עס אין די סוויווע ווו די טעמפּעראַטור איז נידעריקער ווי 20 ℃ אָדער העכער ווי 60 ℃;
- די רעלאַטיוו הומידיטי באדערפענישן פון BUNKERPRO ס אַפּעריישאַנאַל סוויווע זענען: מאַקסימום 80%, מינימום 30%;
- ביטע טאָן ניט נוצן עס אין אַ סוויווע מיט קעראָוסיוו און ברענעוודיק גאַז אָדער אין אַ סוויווע לעבן ברענעוודיק סאַבסטאַנסיז;
- דו זאלסט נישט קראָם עס אַרום באַהיצונג עלעמענטן אַזאַ ווי כיטערז אָדער גרויס קוילד ריזיסטערז;
- עס איז רעקאַמענדיד אַז די הייך פון די אַפּעריישאַנאַל סוויווע זאָל נישט יקסיד 1000 ם; עס איז רעקאַמענדיד אַז די טעמפּעראַטור חילוק צווישן טאָג און נאַכט אין די אַפּעריישאַנאַל סוויווע זאָל נישט יקסיד 25 ° C;
- קעסיידער דורכקוקן און טייַנען די שפּור שפּאַנונג ראָד.
פּריקאָשאַנז פֿאַר עלעקטריקאַל פונדרויסנדיק פאַרלענגערונג
- די קראַנט פון די דערציען פאַרלענגערונג מאַכט צושטעלן זאָל נישט יקסיד 10 אַ, און די גאַנץ מאַכט זאָל נישט יקסיד 480 וו;
זיכערקייַט פּריקאָשאַנז
- אין פאַל פון קיין ספקות בעשאַס נוצן, ביטע נאָכגיין פֿאַרבונדענע לימעד מאַנואַל אָדער באַראַטנ זיך פֿאַרבונדענע טעכניש פּערסאַנעל;
- איידער נוצן, באַצאָלן ופמערקזאַמקייַט צו פעלד צושטאַנד, און ויסמיידן מיס-אָפּעראַציע וואָס וועט פאַרשאַפן פּערסאַנעל זיכערקייַט פּראָבלעם;
- אין פאַל פון ימערדזשאַנסיז, דריקן אַראָפּ די נויטפאַל האַלטן קנעפּל און מאַכט אַוועק די עקוויפּמענט;
- אָן טעכניש שטיצן און דערלויבעניש, ביטע טאָן ניט פּערסנאַלי מאָדיפיצירן די ינערלעך ויסריכט סטרוקטור.
אנדערע פּריקאָשאַנז
- דו זאלסט נישט פאַלן אָדער שטעלן די פאָרמיטל קאַפּויער ווען קעריינג און באַשטעטיקן אַרויף;
- פֿאַר ניט-פּראָפעססיאָנאַלס, ביטע טאָן ניט דיסאַסעמבאַל די פאָרמיטל אָן דערלויבעניש.
ק&א
- ערשטער, באַשטעטיקן צי די מאַכט באַשטימען איז געדריקט; און דעמאָלט באַשטעטיקן צי די קאָנטראָל מאָדע אויסגעקליבן דורך די מאָדע סעלעקציע באַשטימען אויף דער אויבערשטער לינקס זייַט פון די ווייַט קאָנטראָל איז ריכטיק.
- אונטער נאָרמאַל צושטאנדן, אויב BUNKERPRO קענען זיין קאַנטראָולד דורך די ווייַט קאָנטראָל, עס מיטל אַז די שאַסי באַוועגונג קאָנטראָל איז נאָרמאַל; אויב עס קענען באַקומען די באַמערקונגען ראַם פון די שאַסי, עס מיטל אַז די CAN פאַרלענגערונג לינק איז נאָרמאַל. ביטע טשעק צי די באַפֿעל איז סוויטשט צו קענען קאָנטראָל מאָדע.
- BUNKERPRO האט אַ קאָמוניקאַציע שוץ מעקאַניזאַם ין. די שאַסי האט אַ טיימאַוט שוץ מעקאַניזאַם ווען פּראַסעסינג קענען קאָנטראָל קאַמאַנדז פון די אַרויס. רעכן אַז נאָך די פאָרמיטל באקומען אַ ראַם פון קאָמוניקאַציע פּראָטאָקאָל, אָבער עס טוט נישט באַקומען די ווייַטער ראַם פון קאָנטראָל באַפֿעל פֿאַר מער ווי 500מס, עס וועט אַרייַן די קאָמוניקאַציע שוץ, און זייַן גיכקייַט איז 0. דעריבער, די קאַמאַנדז פון דער באַלעבאָס קאָמפּיוטער מוזן פּיריאַדיקלי ארויס.
פּראָדוקט דימענשאַנז
אילוסטראציע דיאַגראַמע פון פּראָדוקט דימענשאַנז


אילוסטראציע דיאַגראַמע פון שפּיץ עקסטענדעד שטיצן דימענשאַנז

Agilex Robotics (Dongguan) CO., Ltd.
WWW.AGILEX.AI
TEL: + 86-0769-22892150
רירעוודיק: +86-19925374409

דאָקומענטן / רעסאָורסעס
 |
אַגילעקס בונקער פּראָ טראַקט רירעוודיק ראָבאָט [pdfבאַניצער מאַנואַל Bunker Pro Tracked Mobile Robot, Bunker Pro, Tracked Mobile Robot, Mobile Robot |



